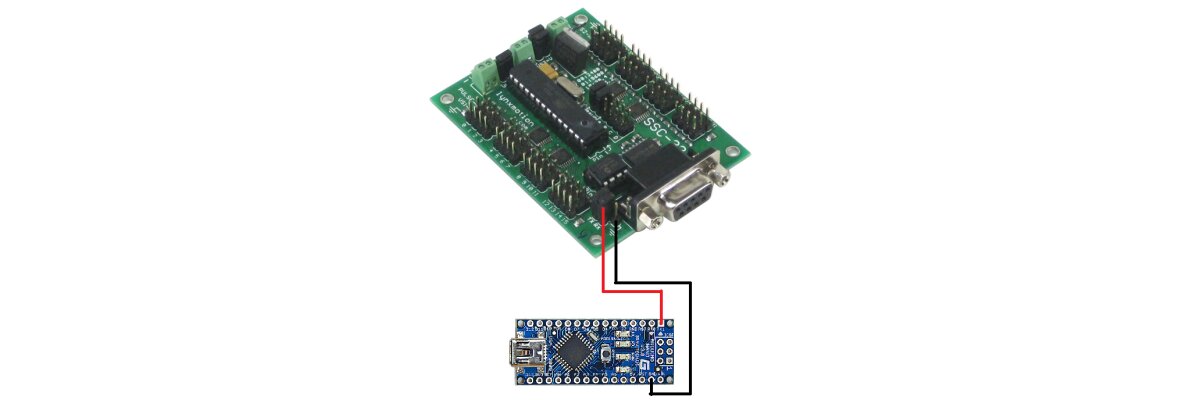

Verkabelung
Die Verkabelung des Arduino Nanos, oder jedes anderem Atmel Microcontroller basierendes Board, gestaltet sich äußerst einfach. Zur Durchführung sind lediglich zwei Adern nötig. Die eine verbindet den TX Ports des Arduinos mit dem RX Ports des SSC32 Boards, und die anedere verbindet die Masse des Arduinos mit der Masse des SSC32.
Programmierung
Da wir ein Arduino Nano als Controllerboard verwenden, nutzen wir auch die dazugehörige und gleichnamige Programmierungsoberfläche. Der Code zur Ansteurung in C sieht somit wie folgt aus:
void setup() {
// Hier wird die Serielle Schnittstelle initialisiert
Serial.begin(9600);}
void loop() {
//Diese Zeilen senden einen Befehl über die Serielle RS232 Schnittstelle an das SSC32
//Es wird der Servoport 0 angesprochen.
Serial.println("#0 P1900 T1200");
delay(1500);
Serial.println("#0 P1100 T1200");
delay(1500);
}
Troubleshooting
Sollte sich das Servo am Port 0 nicht wie gewünscht bewegen, kann dies folgende Gründe haben:
- TX und RX Port wurden nicht richtig angeschlossen
- Masseleitung wurde vergessen
- Die eingestelle Baudrate des Arduinos und des SSC32 stimmen nicht überein
- Servokabel wurde nicht richtigherum auf das SSC32 aufgesteckt
- Der Jumper VS=VL wurde nicht gesteckt - Die Logik hat in diesem Fall keine Spannung