






Sollten bei dieser Anleitung Unklarheiten oder Fragen auftauchen, können Sie gerne jederzeit mit uns über das Kontaktformular in Verbindung treten.

Nachfolgend möchten wir auf die Verwendung von bcnc, in Verbindung mit dem Protoneer CNC Board und dem Open Source Projekt Cyclone PCB Factory eingehen. Das Protoneer CNC Board ist, wie der Name bereits impliziert, eine Controllerboard, welches auf ein Raspberry Pi aufgesteckt wird, und die Steuerung der CNC oder PCB Fräsmaschine übernimmt. Die Cyclone PCB Factory ist eine 3D-gedruckte Platinen Fräsmaschine, welche durch geringe Modifikationen auch als CNC Fräse genutzt werden kann.
Wieso bCNC?
Die Software bCNC bietet viele Vorteile. Zum einen ist es mit dieser möglich eine Reihe von verschiedenen Dateiformaten zu verarbeiten, wie zum Beispiel tap, stl, dxf uvm., zum anderen lassen sich in der Software auch alle benötigten Einstellungen, wie die des Fräsers, oder die Steps per mm, der einzelnen Achsen, sehr einfach einstellen.
Worauf möchten wir alles eingehen?
Ziel dieser kurzen Anleitung ist es, einen ersten Eindruck von der Software zu erhalten und die wichtigsten Einstellungen zu tätigen. Darunter zählen die Einstellungen der einzelnen Achsen, die Auwahl des passenden Fräsers, zur Bearbeitung von Platinen und die Automatische Bed-Leveling Funktion, um bestmögliche Resultate zu erzielen.
Kurze Hardware bzw. Softwareerklärung zur Verwendung von bCNC
bCNC kann man allgemein als gcode Interpreter bezeichnen, was bedeutet, dass eine gewisse Systemstruktur der Steuerung notwendig ist. Üblicherweise wird für kleine Fräsmaschinen ein Arduino Uno Controllerboard und ein CNC Shield verwendet. Diese beiden Komponenten sind für ungefähr 40€ bereits zu haben. Die darauf aufsteckbaren Schrittmotortreiber, in unserem Fall die DRV8825, haben einen maximalen Phasenstrom von 1,5A, sodass zur Verwendung von Schrittmotoren, die größer als Nema 17 sind, externe Motortreiber (H-Bridges) benötigt werden. Die am meisten verwendete Firmware heißt grbl und ist unter der CC-license frei verfügbar. Die Firmware wird mit der Arduino IDE geöffnet und dann per USB auf den Microcontroller geladen. Da wir uns in dieser Anleitung auf das Protoneer CNC Board beziehen, ist es wichtig zu wissen, dass dieses bereits mit der grbl Firmware geflasht ist, und somit direkt verwendet werden kann.
Erstverwendung von bCNC
Nach dem Erststart von bCNC sieht die Software wie nachfolgend abgebildet aus. Über die Kategorie "Serial" kann man alle nötigen Einstellungen tätigen, um den Computer/Raspberry Pi mit dem Controllerboard zu verbinden. 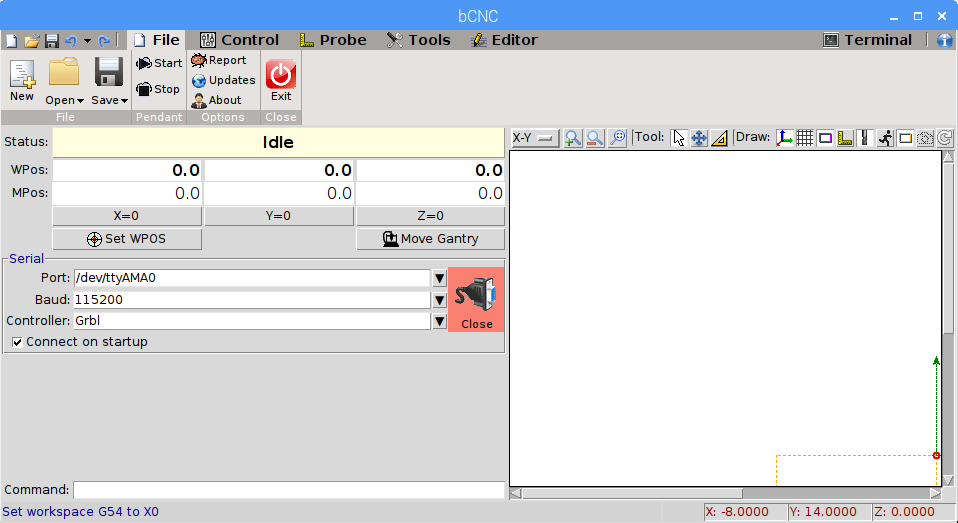
Einstellung der Verfahrgeschwindigkeit und den Steps per Millimeter
Da jede Fräse anders aufgebaut ist, wodurch beispielsweise die Verfahr.- und Fräsgeschwindigkeit ebenfalls anders ist, muss diese immer eingestellt werden. Diese Einstellungen werden mit den Configs $100 - $132 getätigt. Wir fahren unsere 3D-gedruckte Platinenfräse mit 60mm/s. Die meisten Einstellungen können sehr gut durch ausprobieren herausgefunden werden. Sollten die Motoren nur "brummen" statt sich zu drehen, so wurde die Geschwindigkeit zu hoch gewählt.
Lediglich die Steps per Millimeter der einzelnen Achsen müssen berechnet werden.
Schritte pro Umdrehung * Microsteps / Steigung der Spindel
In dem nachfolgenden Rechenbeispiel gehen wir davon aus, dass die Schrittmotoren (1,8° Schrittwinkel / 200 Schritte) direkt an die Trapezgewindespindeln oder Kugelumlaufpsindeln, mit einer Steigung von 1,25mm, geflanscht, und mit 1/16 Microsteps getaktet sind.
200 * 16 / 1,25 = 2560
Nach unserer Rechnung kommen wir auf 2560 Steps um den Fräser einen Millimeter zu bewegen. Diesen Wert, sofern dieser für alle Achsen gleich ist, wird in die Konfigurationsdatei $100/$101/$102 eingetragen und durch einen Klick auf den darüberliegenden "Controller" - Button gespeichert.

Im Anschluss folgt das Ausrichten des Fräsers. Dazu steurt man die einzelnen Achsen über das Controlpanel, zu der gewünschten Position.

Da wir bei unserer Erkläung davon ausgehen, dass wir Platinen fräsen möchten, bietet sich die Automatische Leveling Funktion an. Um diese nutzen zu können, muss der Gravierstichel und die Platine, wie nachfolgend abgebildet, an das Protoneer CNC Board angeschlossen werden. Wir nutzen Krokodilklemmen, die wir nach dem Leveling ganz einfach wieder abklemmen können.

Um nun die Autoleveling Funktion nutzen zu können, muss im rot markierten Bereich die abzutastende Fläche und die Anzahl der Punkte definiert werden. Danach kann man die Funktion, durch einen Klick auf "Scan" ausführen.

Anschließend muss man die obigen rot markierten Werte, unten eintragen und dann auf "Probe klicken"

Zuletzt muss man auf "zero" klicken um die Fräse auf die Startposition zu bringen. Nun hat die Software alle benötigten Pramater ermittelt und der Fräsvorgang kann beginnen.Nun können auch die Kontakte von der Platine und dem Gravierstichel entfernt werden.

