
Wir möchten euch in diesem Beitrag unseren
Lynxmotion Phoenix 3DOF Hexapod vorstellen
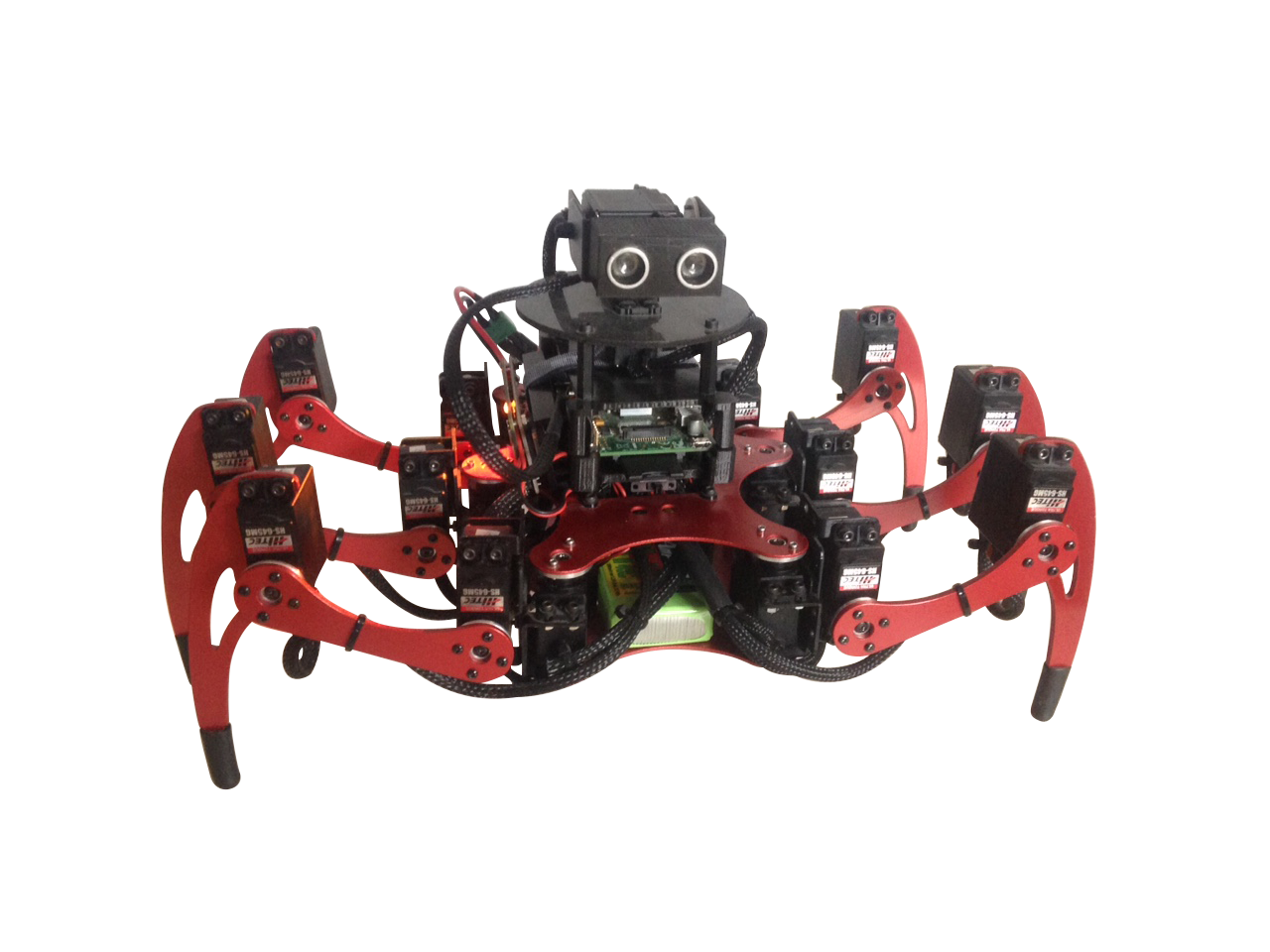
Der Lynxmotion Phoenix ist ein überaus guter Hexapod für sowohl fortgeschrittene Programmierer und Entwickler, als auch beginner. Durch die drei Freiheitsgrade (3DOF) und die gegenüberliegende Anordnung der Beine sind erste Bewegungen schnell programmiert, die Bewegungsvielfalt ist dennoch gegeben.
Auf welche Komponenten haben wir gesetzt?
Bei der Basis handelt es sich um das standard Lynxmotion Phoenix Hexapod Kit. Die Ansteurungselektronik haben wir jedoch auf unsere Bedürfnisse angepasst:
- Hitec HS-645 Digital Servos mit Metallgetriebe
- Lynxmotion SSC32 Servocontrollerboard
- Raspberry Pi B
- SRF05 Ultraschall Distanzsensor
- Western Robotics Hercules BEC 10A
Da es leider keinen passenden Halter zur Verwendung des Raspberry Pi's auf dem Hexapod gab, haben wir uns diesen mittels eines Ultimaker 3D Druckers selbst hergestellt.
Wieso ein Raspberry Pi?
Wir setzen sehr gerne Raspberry Pi's zur Ansteuerung verschiedener Projekte ein, da dieser kleine Einplatinencomputer äußerst günstig, aber dennoch leistungsstark ist. In diesem speziellen Beispiel des Lynxmotion Phoenix, möchten wir den Hexapod noch mit einer Webcam und OpenCV zur Bilderkennung ausstatten. Durch die geringe Sendeleistung der GPS Satelliten ist eine Ortung im inneren von Gebäuden nicht möglich, weswegen sich der Hexapod mittels Bildverarbeitung selbstständig zurecht finden soll. Diese Erweiterung wäre nicht möglich gewesen, wenn wir das originale BotBoard von Lynxmotion oder einen Arduino Microcontroller eingesetzt hätten.
Ausrichtung der Füße
Um einen flüssigen Bewegungsablauf technisch umgesetzt zu bekommen, ist es äußerst wichtig, dass die Füße auf dem gleichen Niveau sind. Zusätzlich dazu ist es noch wichtig, dass die Winkel, die von den einzelnen Komponenten ( Fuß, Schenkel und Schulter) gebildet werden, überall identisch sind. Um dies zu einzustellen stellt Lynxmotion ein eigenes Tool zur Verfügung, welches kostenlos HIER heruntergeladen werden kann.

Über den Button "Calibrate", welcher sich unterhalb des Lynxmotion Logo's befindet, lassen sich die einzelnen Servos kalibrieren. Der eine oder andere, der dass hier liest, denkt sich bestimmt, dass man die Kalibrierung auch im Code vollziehen kann, womit er auch vollkommen recht hat. Dennoch ist es schöner wenn alle Servos bei einem Wert von 1500 die Mittelstellung erreicht haben, und nicht das eine Servo bei 1456, jedoch ein anderes bei 1543 etc. Somit empfehlen wir jedem die Kalibrierung zur Hilfenahme des darüberliegend abgebildete Tool zu vollziehen.
Hexapod Fußsensoren
Darüberliegend haben wir bereits die Kalibrierung der einzelnen Füße vorgestellt, diese Hilft jedoch nicht bei einem unebenen Untergrund. Da ein flüssiger Bewegungsablauf über einen Teppich oder Wiese nicht gewährleistet werden kann, haben wir uns dazu entschieden den Hexapod noch über Drucksensoren in den Füßen auszustatten. Diese sollen eine gleichmäßige Gewichtsverteilung und somit einen flüssigen Bewegungsablauf sicherstellen. Für die Umsetzung haben wir uns für die analogen FSR400 Drucksensoren entschieden, welche eine Kraft von bis zu 20N messen können. Der Vorteil dabei ist zum einen der günstige Preis, als auch die einfache Integration mittels A/D-Converter oder Arduino Nano Board, welches an den Raspberry Pi angeschlossen wird.



