
ROBOTIS OpenManipulator-X
- Codice articolo: MBS-OM-01
- Filtra: 0096718603459
- #global.han#: 905-0024-000
- Categoria: Bracci robotici
-
Produttore:

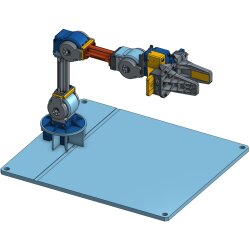
ROBOTIS OpenManipulator
- Basato su DYNAMIXEL X-Serie
- Compatibile con ROS.org
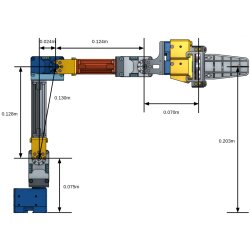
- Raggio d´azione 380mm
Descrizione
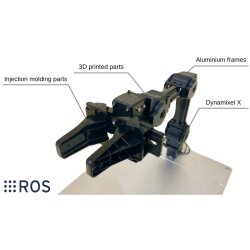
OpenManipulator è stato sviluppato da ROBOTIS come modulo aggiuntivo per il Turtlebot3 Waffle Pi. Per questo motivo, il braccio robotico è completamente compatibile con ROS (Robot Operating System) ed è l´ideale per le applicazioni nel campo della manipolazione mobile.
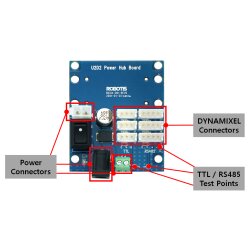
OpenManipulator si basa su servomotori DYNAMIXEL X-Serie e sull´unità di controllo OpenCR1.0.
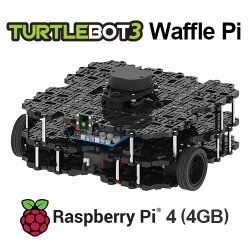
Turtlebot 3 Waffle Pi
OpenManipulator è un dispositivo stand alone, ma può essere utilizzato anche in combinazione al Turtlebot 3 Waffle Pi. Ovviamente il braccio robotico è completamente Open Source e l´integrazione è documentata.

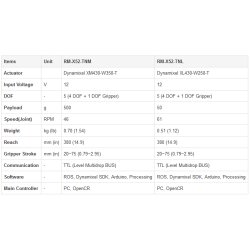
Dati Tecnici

Link di Download & Istruzioni
Contenuto della confezione
- ROBOTIS OpenManipulator
- Cablaggio & Accessori
| #productDetails.itemInformation# | #productDetails.itemValue# |
|---|---|
| Peso di consegna: | 0,97 Kg |
| Peso dell'articolo: | 0,97 Kg |
Recensioni
Non ci sono ancora recensioni.