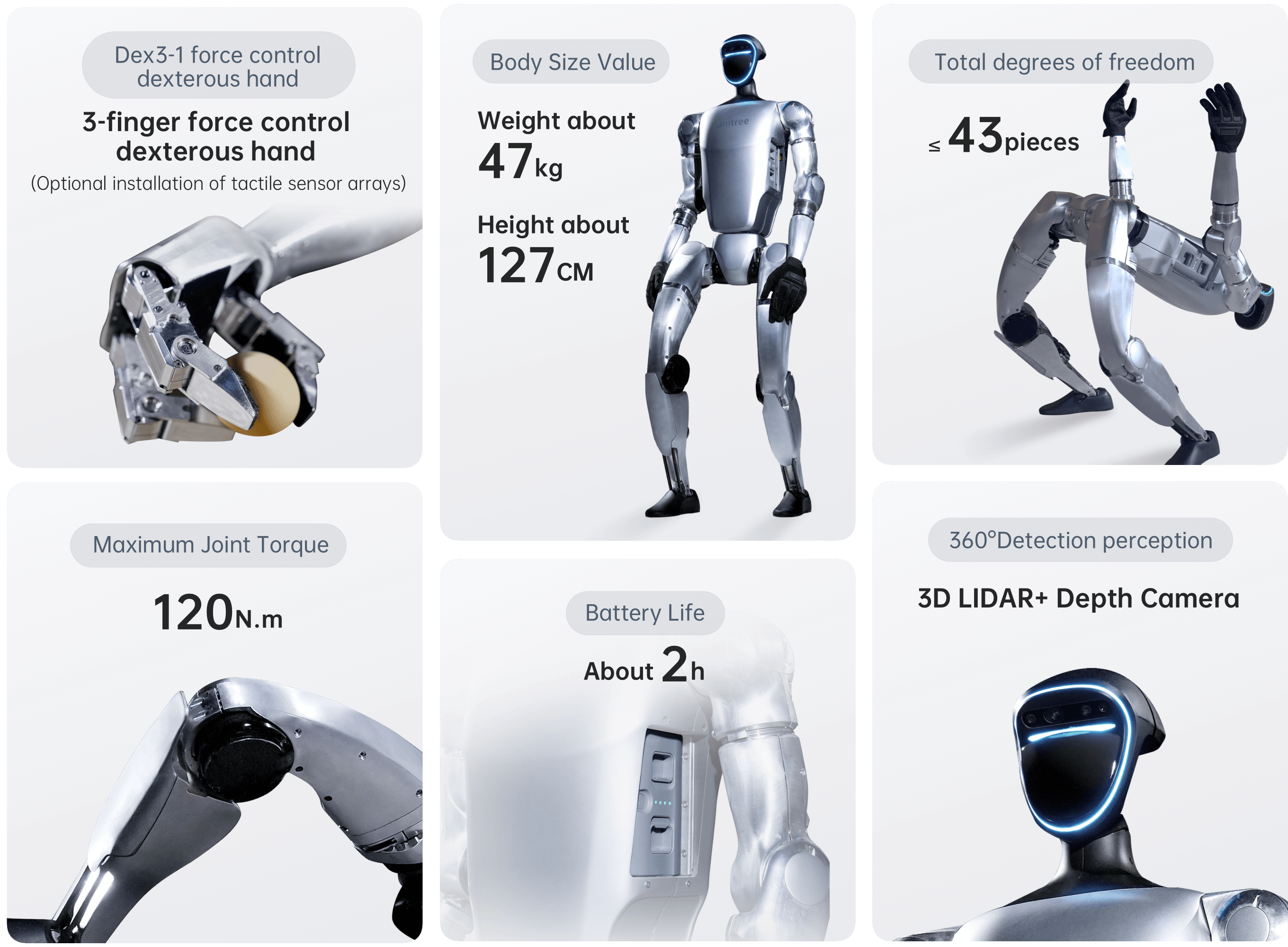
The Unitree G1 is a state-of-the-art humanoid robot that impresses with its remarkable range of motion and advanced technology. With exceptionally large joint mobility and – depending on the version – up to 43 powered degrees of freedom, it clearly surpasses the mobility of an average human.
Through the use of imitation learning and reinforcement learning, the robot continuously develops its skills and thus steadily improves its performance in the field of artificial intelligence.
A particular highlight is the G1's ability to raise itself from lying on the ground into a standing position on its own. Without external help it stands up and is immediately ready for use again.
Note: This function is not available when the robot is equipped with hands.
The G1 can be controlled intuitively and precisely using the VirDyn Full Suit. By capturing human movements in real time, the suit transfers the user's kinematics directly to the robot. This makes it possible to perform complex motion sequences, grasping processes and interactions naturally and without elaborate programming.
This form of teleoperation enables particularly fast commissioning as well as flexible deployment options, for example in research, the training of AI models or in demanding manipulation tasks. At the same time, the high-resolution, low-latency data transmission ensures a stable and synchronous implementation of movements between human and machine.
The Basic version of the Unitree G1 serves primarily as an impressive demonstration and show model. It is ideal for presenting the robot's impressive motion performance, stability and dynamics live – entirely without programming effort.
Anyone who really wants to dive into the depths of robotics research, however, relies on the EDU versions:
Only these variants are fully programmable and offer an open development platform for both high-level and low-level control. This makes custom motion sequences, custom control algorithms and complex AI functions possible.
All EDU models feature an integrated NVIDIA Orin NX 16GB compute unit, which provides enormous performance reserves for real-time AI, perception algorithms and machine learning.
Unitree G1 – Model overview
Comparison of all G1 variants (Basic, Pro, Edu series, Boxing, Comp) including application focus and total degrees of freedom (DOF).
| Model |
Description |
DOF |
| G1 Basic – Entry |
Compact, robust and ready to use immediately. Ideal for first applications without programming. |
23 |
| G1 Pro – Entertainment |
Enhanced performance for tourism, events and content production. 120 N·m knee, 3 kg arm payload, 128-line LiDAR, unlocked movements (dance, kung fu, rolling). No open-source development. |
29 |
| EDU-U1 – Programmable entry |
With NVIDIA Orin NX (100 TOPS) and a full development environment for AI and robotics. |
23 |
| EDU-U2 – Advanced research |
Increased mobility with 7-DOF arms and a 3-DOF waist for complex applications. |
29 |
| EDU-U3 – Grasping (base) |
2× Dex3-1 force-controlled three-finger gripper (without tactile sensing). Based on U2. |
43 |
| EDU-U4 – Grasping (tactile) |
2× Dex3-1 three-finger gripper with tactile sensing (33 sensors per hand). Based on U2. |
43 |
| EDU-U5 – Fine manipulation |
2× Inspire 5-finger hands RH56DFQ-2 (R/L), without tactile sensing. Based on U2. |
41 |
| EDU-U6 – High-end |
2× Inspire 5-finger hands RH56DFTP-2 (R/L) with 17 tactile sensors per hand. Based on U2. |
41 |
| EDU-U7 – Revo 2 Basic |
2× BrainCo Revo 2 Basic 5-finger hands (without sensing). Based on U2. |
41 |
| EDU-U8 – Revo 2 Touch |
2× BrainCo Revo 2 Touch 5-finger hands with tactile sensing (pressure, friction, direction, proximity). Based on U2. |
41 |
| EDU-U9 – Compact |
2× Dex3-1 three-finger gripper (without sensing). Based on U1. |
37 |
| EDU-U10 – Compact + tactile |
2× Dex3-1 three-finger gripper with tactile sensing (33 sensors per hand). Based on U1. |
37 |
| EDU-U11 – Revo 2 Basic compact |
2× BrainCo Revo 2 Basic 5-finger hands (without sensing). Based on U1. |
35 |
| EDU-U12 – Revo 2 Touch compact |
2× BrainCo Revo 2 Touch 5-finger hands with tactile sensing. Based on U1. |
35 |
| EDU-U13 – Tendon-Rope |
2× tendon-rope gripper hands (without sensing), concealed wiring. Based on U2. |
33 |
| EDU-U14 – Tendon-Rope compact |
2× in-house tendon-rope gripper hands (without sensing), concealed wiring. Based on U1. Longer delivery time. |
27 |
| G1 Edu Boxing |
Martial-arts variant with reinforced waist (IM6010-R32), armor, boxing gloves and helmet. UFB/ICRA WBCD-capable. Based on U2. No free warranty; instead a maintenance budget of 4,500 USD. |
29 |
| G1-Comp |
RoboCup Soccer Humanoid League variant with an additional 2-DOF head, D455 depth camera, NVIDIA Jetson Orin and 100 TOPS of compute power. |
25 |
DOF = total number of active joint degrees of freedom incl. hands/grippers. „U1 base" = Edu Standard with 5-DOF arms and a 1-DOF waist (23 DOF base frame); „U2 base" = Edu Advanced with 7-DOF arms and a 3-DOF waist (29 DOF base frame).
Specification
| Specification |
G1 Base |
G1 Standard Version |
G1 Advanced Version |
| Dimensions (standing) |
1,270 × 450 × 200 mm |
1,270 × 450 × 200 mm |
1,270 × 450 × 200 mm |
| Dimensions (folded) |
690 × 450 × 300 mm |
690 × 450 × 300 mm |
690 × 450 × 300 mm |
| Weight |
approx. 35 kg |
approx. 35 kg+ |
approx. 35 kg+ |
| Degrees of freedom |
23 |
23–43 |
23–43 |
| Programmable |
No |
Yes |
Yes |
| Operating time |
approx. 2 h |
approx. 2 h |
approx. 2 h |

Scope of delivery
- Unitree G1 (depending on version)
- Controller
- 9,000 mAh battery




