















Unitree G1
- Codice articolo: 1121
- #global.han#: G1
- Categoria: Robot multizampe
-
Produttore:

Unitree G1
- Sale via QUADRUPED
- Disponibile in diverse versioni: Base, EDU
- Programmabile solo dalla versione EDU
- Disponibile dall'inizio del 2025
Descrizione
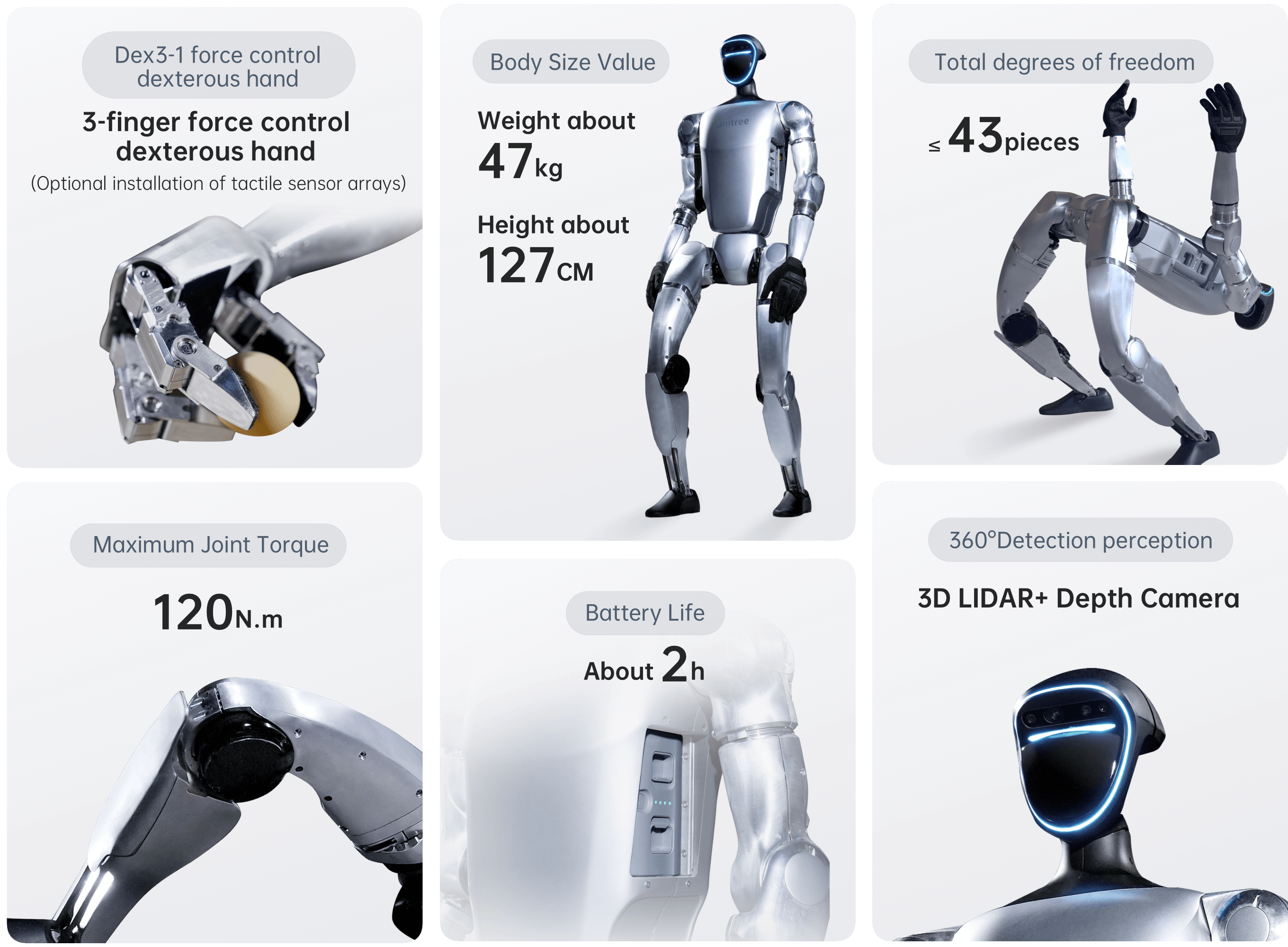
L'Unitree G1 è un robot umanoide all'avanguardia che colpisce per la sua notevole libertà di movimento e la tecnologia evoluta. Con una mobilità articolare eccezionalmente ampia e – a seconda della versione – fino a 43 gradi di libertà motorizzati, supera nettamente la mobilità di una persona media.
Grazie all'impiego dell'apprendimento per imitazione e del reinforcement learning, il robot sviluppa continuamente le proprie capacità migliorando costantemente le prestazioni nell'ambito dell'intelligenza artificiale.
Un punto di forza particolare è la capacità del G1 di rialzarsi autonomamente da terra fino alla posizione eretta. Senza alcun aiuto esterno si solleva ed è immediatamente di nuovo operativo.
Nota: questa funzione non è disponibile quando il robot è equipaggiato con le mani.
Il G1 può essere comandato in modo intuitivo e preciso tramite il VirDyn Full Suit. Acquisendo i movimenti umani in tempo reale, la tuta trasferisce la cinematica dell'utente direttamente al robot. In questo modo è possibile eseguire sequenze di movimento complesse, processi di presa e interazioni in modo naturale e senza una programmazione laboriosa.
Questa forma di teleoperazione consente una messa in servizio particolarmente rapida e possibilità di impiego flessibili, ad esempio nella ricerca, nell'addestramento di modelli di IA o in attività di manipolazione complesse. Allo stesso tempo, la trasmissione dati ad alta risoluzione e bassa latenza garantisce una realizzazione stabile e sincrona dei movimenti tra uomo e macchina.
La versione Basic dell'Unitree G1 funge principalmente da impressionante modello dimostrativo e da esposizione. È ideale per presentare dal vivo le notevoli prestazioni di movimento, la stabilità e la dinamica del robot – del tutto senza alcuno sforzo di programmazione.
Chi invece desidera immergersi davvero nelle profondità della ricerca robotica punta sulle versioni EDU:
solo queste varianti sono completamente programmabili e offrono una piattaforma di sviluppo aperta sia per il controllo high-level sia low-level. Ciò rende possibili sequenze di movimento personalizzate, algoritmi di controllo custom e funzioni di IA complesse.
Tutti i modelli EDU dispongono di un'unità di calcolo integrata NVIDIA Orin NX 16GB, che mette a disposizione enormi riserve di prestazioni per IA in tempo reale, algoritmi di percezione e machine learning.
Unitree G1 – Panoramica dei modelli
Confronto di tutte le varianti G1 (Basic, Pro, serie Edu, Boxing, Comp) con focus applicativo e gradi di libertà totali (DOF).
| Modello | Descrizione | DOF |
| G1 Basic – Base | Compatto, robusto e immediatamente operativo. Ideale per le prime applicazioni senza programmazione. | 23 |
| G1 Pro – Entertainment | Prestazioni potenziate per turismo, eventi e produzione di contenuti. Ginocchio 120 N·m, carico braccio 3 kg, LiDAR a 128 linee, movimenti sbloccati (danza, kung-fu, rolling). Nessuno sviluppo open-source. | 29 |
| EDU-U1 – Ingresso programmabile | Con NVIDIA Orin NX (100 TOPS) e ambiente di sviluppo completo per IA e robotica. | 23 |
| EDU-U2 – Ricerca avanzata | Maggiore mobilità con braccia a 7 DOF e vita a 3 DOF per applicazioni complesse. | 29 |
| EDU-U3 – Presa (base) | 2× pinza a tre dita Dex3-1 a controllo di forza (senza sensoristica tattile). Su base U2. | 43 |
| EDU-U4 – Presa (tattile) | 2× pinza a tre dita Dex3-1 con sensoristica tattile (33 sensori per mano). Su base U2. | 43 |
| EDU-U5 – Manipolazione fine | 2× mani a 5 dita Inspire RH56DFQ-2 (R/L), senza sensoristica tattile. Su base U2. | 41 |
| EDU-U6 – High-end | 2× mani a 5 dita Inspire RH56DFTP-2 (R/L) con 17 sensori tattili per mano. Su base U2. | 41 |
| EDU-U7 – Revo 2 Basic | 2× mani a 5 dita BrainCo Revo 2 Basic (senza sensoristica). Su base U2. | 41 |
| EDU-U8 – Revo 2 Touch | 2× mani a 5 dita BrainCo Revo 2 Touch con sensoristica tattile (pressione, attrito, direzione, prossimità). Su base U2. | 41 |
| EDU-U9 – Compatto | 2× pinza a tre dita Dex3-1 (senza sensoristica). Su base U1. | 37 |
| EDU-U10 – Compatto + tattile | 2× pinza a tre dita Dex3-1 con sensoristica tattile (33 sensori per mano). Su base U1. | 37 |
| EDU-U11 – Revo 2 Basic compatto | 2× mani a 5 dita BrainCo Revo 2 Basic (senza sensoristica). Su base U1. | 35 |
| EDU-U12 – Revo 2 Touch compatto | 2× mani a 5 dita BrainCo Revo 2 Touch con sensoristica tattile. Su base U1. | 35 |
| EDU-U13 – Tendon-Rope | 2× mani di presa tendon-rope (senza sensoristica), cablaggio nascosto. Su base U2. | 33 |
| EDU-U14 – Tendon-Rope compatto | 2× mani di presa tendon-rope proprietarie (senza sensoristica), cablaggio nascosto. Su base U1. Tempi di consegna più lunghi. | 27 |
| G1 Edu Boxing | Variante per arti marziali con vita rinforzata (IM6010-R32), corazzatura, guantoni e casco da boxe. Idonea UFB/ICRA WBCD. Su base U2. Nessuna garanzia gratuita; al suo posto un budget di manutenzione di 4.500 USD. | 29 |
| G1-Comp | Variante per la RoboCup Soccer Humanoid League con testa aggiuntiva a 2 DOF, telecamera di profondità D455, NVIDIA Jetson Orin e 100 TOPS di potenza di calcolo. | 25 |
DOF = numero totale di gradi di libertà articolari attivi incl. mani/pinze. „Base U1" = Edu Standard con braccia a 5 DOF e vita a 1 DOF (struttura base 23 DOF); „Base U2" = Edu Advanced con braccia a 7 DOF e vita a 3 DOF (struttura base 29 DOF).
Specifica
| Specifica | G1 Base | G1 Standard Version | G1 Advanced Version |
|---|---|---|---|
| Dimensioni (in piedi) | 1.270 × 450 × 200 mm | 1.270 × 450 × 200 mm | 1.270 × 450 × 200 mm |
| Dimensioni (ripiegato) | 690 × 450 × 300 mm | 690 × 450 × 300 mm | 690 × 450 × 300 mm |
| Peso | ca. 35 kg | ca. 35 kg+ | ca. 35 kg+ |
| Gradi di libertà | 23 | 23–43 | 23–43 |
| Programmazione | No | Sì | Sì |
| Autonomia | ca. 2 h | ca. 2 h | ca. 2 h |

Contenuto della confezione
- Unitree G1 (a seconda della versione)
- Controller
- Batteria da 9.000 mAh
Recensioni
Non ci sono ancora recensioni.




