







Als zukünftigen Neuzugang zu unserem Sortiment stellen wir hier den YDLIDAR X4 vom gleichnamigen chinesischen Unternehmen vor. YDLIDAR ist eine Marke von EAIBOT, und produziert sowohl LiDAR Systeme als auch komplette Plattformen für die Lehre und Forschung. Der hier vorgestellte X4 ist mit ungefähr 99€ der derzeit günstigste LiDAR des Unternehmens, und wahrscheinlich sogar, im Bereich der 360° Messung, der günstigste weltweit.
Stichpunktartige Auflistungen der Features, die wir nachfolgend praktisch testen möchten:
- Leichte ROS Integration
- Bis zu 11m Scanbereich
- 5000 Abtastungen / Sek.
- 6-12Hz (Wir testen mit 7Hz)
Lieferumfang
Neben dem LiDAR liegen der Einheit ebenfalls diverse Zusatzartikel bei
- USB UART Konverter
- Zusätzlicher Antriebsriemen
- UART Kabel
- Schrauben, zur Befestigung des LiDARs
Optik, Haptik & technische Umsetzung
Die Optik und Haptik ist bei einem Preis von unter 100€ selbstverständlich nicht überragend, Konstruktions.- oder Fertigungsmängel konnten dennoch nicht entdeckt werden. Der Riemenantrieb kann sowohl als Vorteil als auch Nachteil ausgelegt werden. Nach einiger Zeit wird der Gummiriemen selbstverständlich gedehnt, wodurch sich ein mechanisches Backlash bilden wird, anderer Seits ist somit eine Verschleißarme und vorallem sehr günstige Antriebsart geschaffen worden.
Der externe UART USB Konverter hätte man wahrscheinlich besser auf der Steuereinheit, welche unterhalb der Mechanik platzt gefunden hat, integriert. In der Regel erfreuen sich solche externen Devices keiner großen Beachtung, wodurch diese häufig in Midleidenschaft gezogen werden. Nicht all zu selten geraten diese an Spannungsführende oder Mechanische Teile, was eine Fehlfunktion auslösen kann. Aber auch hierbei kann anders argumentiert werden, dass liegt ganz daran wie und wo solche Gerätschaften eingesetzt werden.
Alles in allem kann jedoch mit vollster Überzeugung gesagt werden, dass der LiDAR sowohl auf den ersten, als auch auf den zweiten Blick einen guten Eindruck macht.
Softwareumfang
EAIBOT stellt neben dem LiDAR selbst ebenfalls ein eigenes SDK und ROS Node zur Verfügung. Die Bezeichnung SDK lässt auf eine etwas funktioneller Software hoffen. Im Gegenteil ist das Tool eher zur Darstellung der Messdaten geeignet. Eine weitere Verarbeitung bzw. Auswertung dieser ist nicht möglich.
Der ROS Node hingegen funktioniert tadellos. Die Installation aller benötigten Pakete ist dank Github in weniger als 5 Minuten erledigt, weshalb man direkt nach Erhalt des LiDARs mit der Entwicklung eigener SLAM Alogrithmen beginnen kann.
Die vorgefertigten Launch Files ermöglichen einen schnellen ersten Funktionstest und steigern die Freunde noch ein wenig.
Inbetriebnahme unter ROS
Der Hersteller stellt einen vollständigen ROS Node inklusive Launch File zur Verfügung.
-
cd ~/catkin_ws/src
-
git clone https://github.com/EAIBOT/ydlidar
-
catkin_make --pkg ydlidar
-
roscd ydlidar/startup
sudo chmod 0777 * -
roscd ydlidar/launch
vim lidar.launch - Änderung der Baudrate auf 128 000 bps -
roslaunch ydlidar lidar_view.launch
Troubleshooting
- LiDAR dreht sich lediglich 1/4 Umdrehung und stoppt dann
In diesem Fall handelt es sich vermutlich um eine zu geringe Leistungsabgabe der USB Ports. Dies tritt besonders häufig bei Raspberry Pi's mit zu langem Netzteilkabel, Externes Power Shield oder Netzteil mit einer zu geringen Leistungsabgabe kleiner 2 Watt auf. Infolge dessen kann das Problem durch die Verwendung eines leistungsstärkeres Netzteil oftnmals behoben werden.
- Der Befehl roslaunch ydlidar lidar_view.launch kann nicht ausgeführt werden
Dieser Fehler resultiert oftmals aus einem noch nicht gestartetem ROS Server. Das Problem lässt sich sehr einfach mittels zweitem Terminal behoben werden, in dem folgender Befehl als erstes ausgeführt wird: roscore
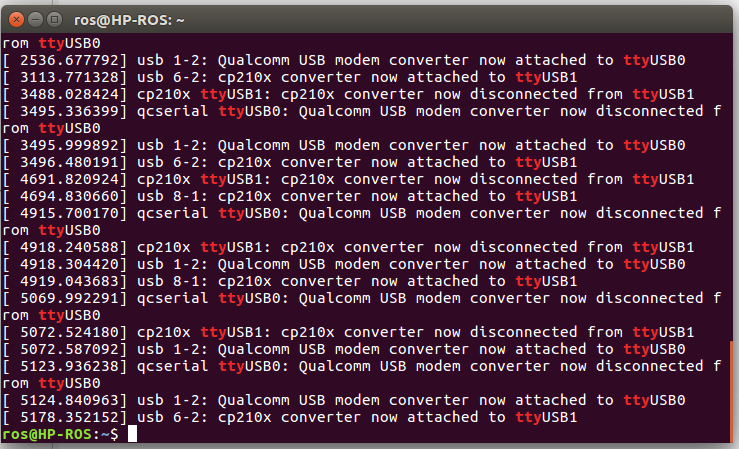
- Der LiDAR kann nicht angesteuert werden / wird nicht erkannt
Ob der LiDAR bzw. das UAB UART Modul erkannt wird kann mit dmesg | grep tty getestet werden. Sollte der cp210x Converter nicht angezeigt werden, so ist dieser defekt, oder die verwendeten USB Kabel sind zu lang. Es wird eine Kabellänge von maximal 50-70cm empfohlen.
Indoor-Mapping
Der Scanprozess ohne fremde Lichteinstrahlung z.B. in Gebäuden funktioniert hervorragend. Der Messfehler ist äußerst gering, wodurch exakte 2D Maps erstellt werden können.

Wie man auf dem darüberliegenden Screenshot gut erkennen kann, sind die Kanten sehr scharf. Der Raum beträgt 6 x 4m und die linke lange Seite, mit den wenigen Messpunkten resultiert daher, dass auf dieser Seite eine Fensterfront liegt, von der das Licht lediglich von den Mittelstreben, bzw dem Fensterrahmen reflektiert wird.
Outdoor-Mapping
Die Outdoorfähigkeit eines LiDARS, oder allgemein Sensorik basierend auf einer Laufzeitmessung des Lichts, gestaltet sich im freien, besonders bei Schnee oder im Sommer bei hoher Sonneneinstrahlung, als schweirig. Wir haben den YDLIDAR X4 draußen unter folgenden Gegebenheiten getestet:
Sonnige Wiese
Auf einer Wiese, auf die nahezu im rechten Winkel die Sonne einstrahlt, ist eine Messung nur begrenzt möglich. Sowohl bei kleinen, als auch mittelgroßen Distanzen (0,3-3m), können Messwerte generiert werden, diese sind jedoch unter umständen fehlerbehaftet
Schattige Orte
Im Schatten funktioniert der X4 überraschend gut. In diesem Fall ist die maximal angegebene Scandistanz von 11m nicht möglich, wir konnten jedoch immer hin in unserem parktischen Test einen Radius von 5m erreichen.

