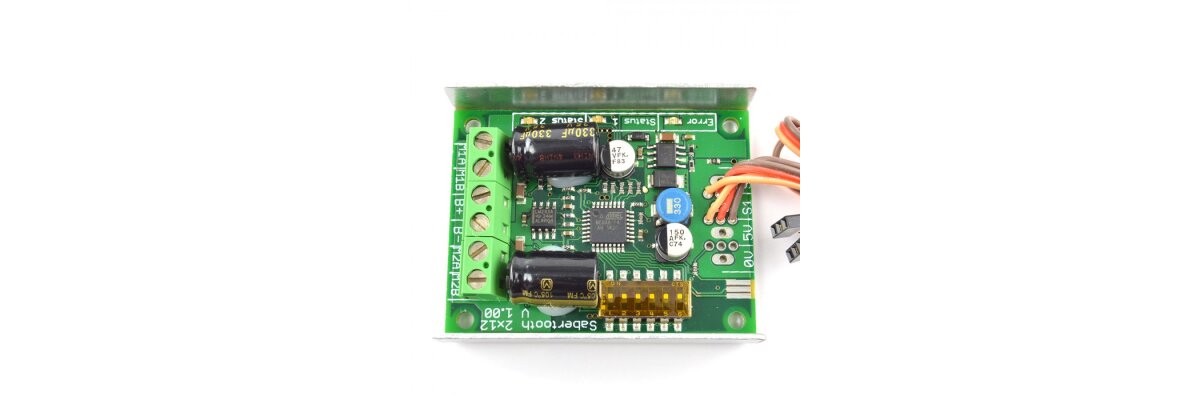

Das Sabertooth 2x12A Motorcontrollerboard wird mittels PWM Signale angesteurt. Diese Signalart wird übelicherweise zur Dimmung von LED's oder der Ansteuerung von Modellbauservos genutzt. Nahezu jeder Microcontroller besitzt einen Analog/Digital Converter und ist somit in der Lage PWM Signale zu modellieren. Diese Signalart wird auch Rechtecksignal genannt, bei dem das High und Low-Level des Signals bestimmt wird.
Das besondere an diesem Motorcontroller ist noch der integrierte Atmel Microncontroller der für ein gleichmäßiges Anfahr und Bremsverhalten sorgt. Sollte man für solch hohe Stromstärken einen Motorcontroller mit nur H-Brücken konzepieren, so wäre das Ansteuerverhalten für die meisten Anwendungen unbrauchbar.
Der nachfolgende Arduino Code wird normalerweise zur Positionierung eines Servos genutzt, jedoch kann damit auch das Modul angesteuert werden. Die orange Ader des Kabels wird mit dem Arduino Port D7 verbunden.
#include
Servo sabertooth;//Beim nachfolgend deklarierten Pin handelt es sich um D7
void setup(){
sabertooth.attach(7);
}
// Hauptprogramm
void loop(){
sabertooth.write(90);
}
Der Motor dreht nun mit 50% der maximal möglichen Drehzahl. Durch Veränderung des Parameters in der letzten Zeile (90), verändert sich auch dementsprechend die Drehzahl.



