
Vorstellung des Lynxmotion AL5D Roboterarms

| Produktbezeichnung | Lynxmotion AL5D |
| Hersteller | Lynxmotion |
| Verwendete Servos | Hitec HS422HB / HS645MG / 755HB / 805HB / HS485HB |
| Servocontrollerboard | Lynmxotion SSC-32U / Lynxmotion SSC-32 |
| Mechanik Komponenten | Großteil aus Aluminium, Drehteller und Greifer aus Kunststoff |
Nachfolgend möchten wir den Lynxmotion AL5D Roboterarm, sowohl von der Software als auch von der Hardware vorstellen. Bei unserem Demogerät handelt es sich um die nicht aktuellste Version des Roboterarmes, diese unterscheidet sich jedoch im direkten Vergleich zur aktuellen Version lediglich durch das Lynxmotion SSC32 Servocontrollerboard. Die aktuelle Version erlaubt eine Kommunikation über XBee und USB, unsere Version jedoch nur über RS232. Die Kommandos bleiben bei allen Bussystemen die selben.
Allgemein
Der Lynxmotion AL5D ist ein sehr beliebter Roboterarm für einen vielseitigen Anwendungsbereich. Durch die Kombination der leichten, aber dennoch sehr verwindungssteifen Aluminiumkomponenten, gepaart mit den hochwertigen Hitec Servos, sind flüssige und sehr genaue Bewegungen möglich. Wie bereits weiter oben aufgelistet, wurden die Servos mit bedacht ausgewählt, so haben die Servos, die eine größere Kraft aufnehmen müssen, bis zu 200N Drehmoment.
Mechanik
Die Alukomponenten wurden mittels Wasserstrahlschneideanalge, und die Kunststoffteile mittels Spritzgussverfahren passgenau gefertigt. Dadurch ergibt sich ein leichtes aber dennoch sehr hochwertiges Produkt.

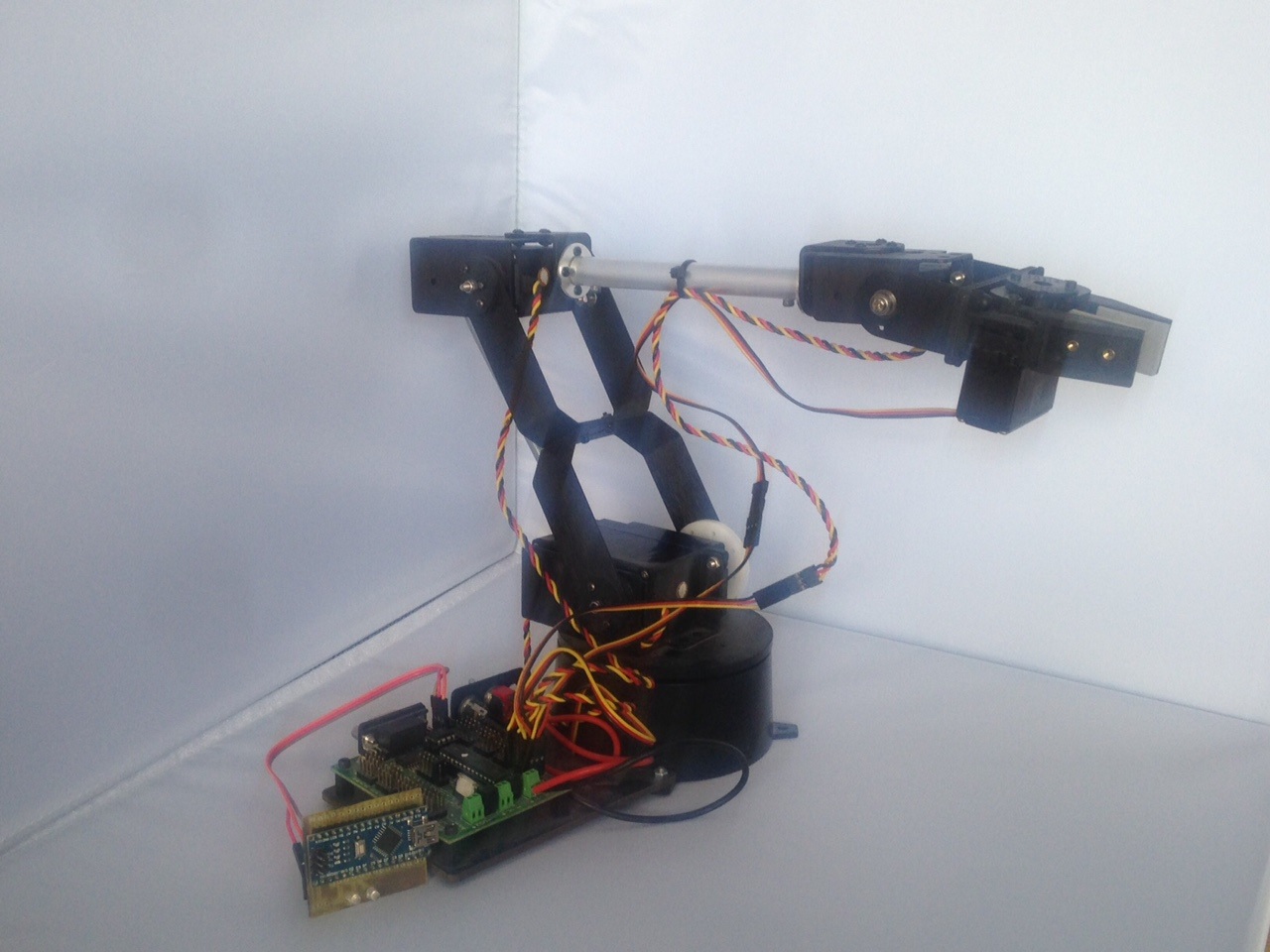
Wie auf dem darüberligenden Foto abgebildet verfügt der Roboterarm standardmäßig über einen Greifer mit gummierten Schaumstoff zur besseren Adhäsion des zu greifenden Objekts. Sollte man noch einen weiteren Freiheitsgrad benötigen, so kann die Funktion einer Drehung des Greifers nachgerüstet werden.
Hardware / Software
In unserem Beispiel haben wir ein kostengünstiges Arduino Nano zur Ansteurerung des SSC32 Servocontrollerboards verwendet. Je nach Bedarf kann aber auch jedes andere Entwicklungsboard bzw. Microcontroller verwendet werden.
Im nachfolgenden Arduino Quellcode greift der Lynxmotion AL5D nach einem kleinen 3x3cm großen Klotz und platziert diesen an einem anderem Ort. Das Beispiel ist sehr simpel gehalten, verdeutlicht jedoch die Wiederholgenauigkeit und Zuverlässigkeit des Roboterarms.

void setup() {
// Hier wird die Serielle Schnittstelle initialisiert
Serial.begin(9600);
}void loop() {
//Diese Zeilen senden einen Befehl über die Serielle RS232 Schnittstelle an das SSC32//Erläuterung der Ansteuerung
//Serial.println("#Servoport PPosition TStellgeschwindigkeit");
Serial.println("#0 P1500 T2000");
Serial.println("#1 P1500 T2000");
Serial.println("#2 P1700 T2000");
Serial.println("#3 P1700 T2000");
Serial.println("#4 P1500 T2000");
Serial.println("1");delay(3000);
Serial.println("#2 P1900 T2300");
Serial.println("#3 P1900 T2300");
Serial.println("2");delay(3000);
Serial.println("#4 P1800 T2000");
Serial.println("#1 P1100 T2000");
Serial.println("3");delay(2500);
Serial.println("#0 P1000 T2000");
Serial.println("#2 P1800 T2000");
Serial.println("#3 P1400 T2000");
Serial.println("4");delay(2500);
Serial.println("#0 P1400 T2000");
Serial.println("5");delay(2500);
Serial.println("#0 P1500 T2000");
Serial.println("#1 P1500 T2000");
Serial.println("#2 P1700 T2000");
Serial.println("#3 P1700 T2000");
Serial.println("#4 P1500 T2000");
Serial.println("6");delay(2500);
Serial.println("#4 P1200 T2000");
Serial.println("#1 P1100 T2000");
Serial.println("7");delay(2500);
Serial.println("#2 P1800 T2000");
Serial.println("#3 P1400 T2000");
Serial.println("8");
delay(2500);
Serial.println("#0 P1000 T2000");
delay(2500);}


