

Die MYBOTSHOP USB2RS Steuereinheit ermöglicht die komfortable Ansteuerung und Überwachung von Dynamixel Servomotoren mit einer RS485 Schnittstelle. Das Modul verfügt über eine native USB Schnittstelle und muss lediglich in einen freien Port eingesteckt werden. Bei Auslieferung ist das Board bereits mit einem Arduino Bootloader und unserer ROS Firmware geflasht.
Kompatible DYNAMIXEL Servomotoren
Das USB2RS wurde für Dynamixel Servomotoren mit RS485 Schnittstelle konzipiert. Die verwendete Schnittstelle kann bereits optisch bestimmt werden, da die RS485 über vier (4) Daten.- bzw. Stromleitungen verfügt, wohin gegen man bei der Half Duplex UART Schnittstelle mit lediglich drei (3) Kontakten auskommt.
Darüber hinaus kann der Bus ebenfalls über den Artikelname bestimmt werden. Jeder Dynamixel Arikelname der auf "R" endet wurde mit einer RS485 Schnittstelle ausgestattet. Beispiele dafür werden nachfolgend aufgeführt.
Sollten Sie hingegen Servomotoren mit einer Half Duplex UART Schnittstelle verwenden wollen, empfehlen wir unser Raspberry Pi DSC, welches lediglich auf das Raspberry Pi aufgesteckt wird, und über die UART Schnittstelle kommuniziert.
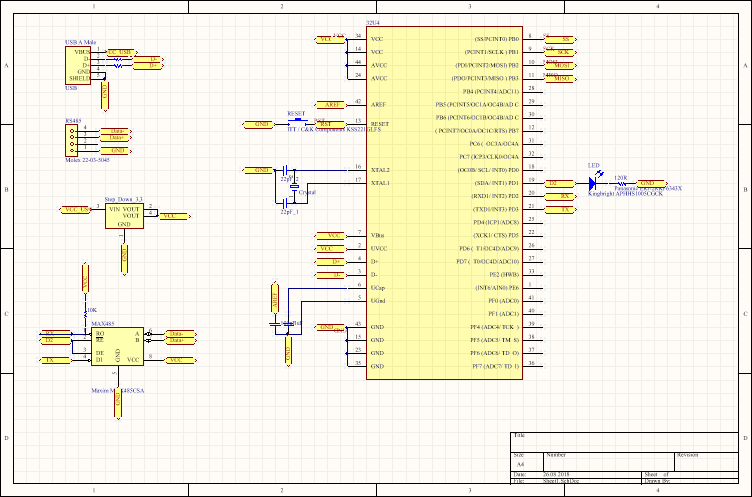
Aufbau des USB2RS & verwendete Bauteile

Die von uns entwickelte USB2RS Steuerung basiert auf einem Atmega32u4 mit nativen USB Port, zum Upload der entsprechenden Firmware sowie zum Datenaustausch mit dem Computer/Entwicklungsboard. Darüber hinaus stellt das uC ebenfalls eine UART Schnittstelle zur Verfügung, welche mittels ADM485 den bidirektionale RS485 Bus bildet. Abgrundet wird die Steuerung infolge eines stabilisierten 16MHz Quarzes, welcher eine Frequenztoleranz von nur ± 20ppm besitzt.
Vorbereitung zur Inbetriebnahme
Wie bereits weiter oben erwähnt ist das USB2RS sowohl Arduino als auch ROS kompatibel. Da der Adapter über einen Atmega32u4 8bit Mikrocontroller verfügt, welcher mit der gewünschten Firmware geflasht werden muss, wird nachfolgend chronologisch das Setup erklärt und veranschulicht.
Der Atmega32u4 verfügt über einen nativen USB Port, weswegen sowohl für den Upload der Firmware, als auch für dem Datenaustausch während der Nutzung, keine weitere Perepherie benötigt wird!
Arduino IDE
Um sowohl den Upload des Arduino Sketches (ROS Firmware) als auch die Kompilierung aller benötigten Arduino Bibliotheken vollziehen zu können, wird die vollständige Arduino IDE benötigt. Die Pakete bitte über die Arduino Downloadseite herunterladen und nicht über den folgenden Befehl installieren: apt-get install Arduino
Sollte nach dem Start der Arduino IDE kein Boardmanager auffindbar sein, so wurde nicht die richtige Arduino IDE installiert.
Nachfolgend müssen noch die rosserial packages, zur Kommunikation zwischen Computer / Entwicklungsboard und MYBOTSHOP USB2RS, mit folgenden befehlen installiert werden
- sudo apt-get install ros-[VERSION]-rosserial-arduino
- sudo apt-get install ros-[VERSION]-rosserial
Erstellung des Workspaces
- cd
/src - git clone https://www.github.com/ros-drivers/rosserial.git
- cd
- catkin_make
Mit den nachfolgenden Befehlen werden die Arduino Bibliotheken generiert
- cd
/libraries - rm -rf ros_lib
- rosrun rosserial_arduino make_libraries.py .
Zuletzt die Arduino IDE starten und als Board den Arduino/Genuino Micro, wie nachfolgend abgebildet auswählen. Wie gewohnt kann danach der Code hochgeladen werden.
Sollten beim hochladen oder im Gebrauch Fehlfunktionen auftreten, bitte den Code überprüfen. Die ROS Firmware des DSC und des USB2RS ähneln sich sehr stark, sind jedoch nicht identisch.

Bootloader flashen
Bei Auslieferung ist der Bootloader bereits geflasht und das USB2RS kann sofort verwendet werden. Für diejenigen die eine modifizierte Version hochladen möchten, können die 6-Pin ISP Schnittstelle nutzen. Diese wurde auf der Rückseite des Boards in Form von sechs (6) Messpunkten realisiert. Der viereckig umrandete Messpunkt ist MISO.


