






ALOHA 2: Advancing Low-Cost Bimanual Teleoperation
ALOHA 2 is a next-generation platform engineered to facilitate advanced bimanual teleoperation, providing significant enhancements in precision, ergonomics, and adaptability for complex robotic manipulation tasks. Designed for scalability, ALOHA 2 enables efficient control and data collection in diverse applications, from research labs to industrial settings. Its robust construction and user-centric features make it a valuable tool for researchers and developers focused on robotic learning, teleoperation, and human-robot interaction. With ALOHA 2, users can seamlessly experiment with high-dimensional tasks involving coordinated use of both robotic arms, contributing to breakthroughs in machine learning, automation, and collaborative robotics. The open-source nature of ALOHA 2 allows for customization and further innovation, empowering the global robotics community to build upon its capabilities and drive advancements in robotic manipulation.

What is ALOHA 2?
ALOHA 2 is a highly advanced teleoperation platform that builds upon the foundation of the original ALOHA system, delivering extensive upgrades in both hardware and software to address its predecessor’s limitations. ALOHA 2 has been specifically designed to expand data collection capabilities, offering researchers a more robust and versatile tool for studying and implementing complex robotic manipulation tasks. With a focus on ergonomic improvement, system durability, and ease of use, ALOHA 2 aims to streamline the teleoperation experience for long-term, high-demand applications in robotic learning, human-robot interaction, and remote manipulation.
The platform’s open-sourced hardware designs make it accessible to researchers worldwide, encouraging collaborative development and innovation in robotic manipulation. By providing customizable, scalable hardware components and modular software, ALOHA 2 enables global contributors to tailor the platform to specific research needs, fostering advancements in robotic learning and data-driven automation.
Key Features:
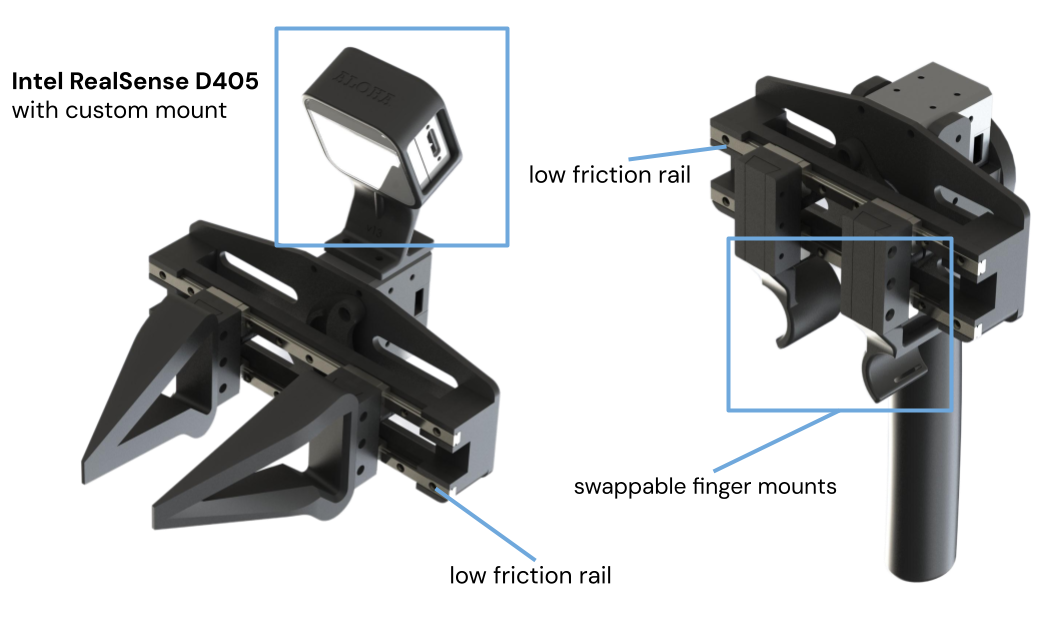
- Enhanced Grippers: Equipped with a low-friction rail system, the grippers provide smooth, precise, and responsive handling for delicate and heavy-duty tasks alike. The redesign focuses on maximizing teleoperation accuracy, allowing researchers to perform complex manipulations with heightened control and reduced lag.
- Advanced Gravity Compensation: A passive, mechanically optimized gravity compensation system offers superior comfort and reduces the physical strain on users compared to previous rubber band mechanisms. This system enhances control stability, contributing to safer and more comfortable long-duration operations.
- Reinforced Frame and High-Resolution Cameras: Built with durable aluminum extrusions, the frame of ALOHA 2 is both lightweight and highly stable, making it suitable for handling larger objects and accommodating human collaborators within the workspace. The integration of Intel RealSense D405 cameras provides a high-fidelity visual environment, offering real-time depth perception and a wide field of view to improve spatial awareness and manipulation flexibility.

The open-source approach of ALOHA 2 encourages a collaborative environment where researchers can contribute enhancements to its design and software, pushing the boundaries of what’s possible in teleoperation and robotic manipulation. Learn more on the project website.
How ALOHA 2 Works
The operation of ALOHA 2 leverages significant advancements in both hardware and simulation, allowing for seamless adaptation to intricate manipulation tasks. This sophisticated setup facilitates large-scale data collection while providing a robust and flexible framework for teleoperation, manipulation, and machine learning research. By integrating state-of-the-art components and simulations, ALOHA 2 offers researchers a versatile platform that can replicate real-world conditions in a controlled, virtual environment, enhancing the precision and scope of robotic studies.
Key Components:
- Redesigned Grippers: ALOHA 2’s grippers have been optimized to minimize latency, improve force control, and enhance handling of objects with varying weights and shapes. The setup includes two types of grippers: an ergonomic leader gripper used by the teleoperator and follower grippers designed for durability and responsiveness during complex tasks. This pairing allows for intuitive control while offering precise manipulation feedback.
- Frame Redesign: The robust frame, crafted from lightweight yet sturdy aluminum extrusions, provides enhanced structural stability to handle diverse robotic operations. It can accommodate larger props and support human collaborators within the workspace, offering researchers flexibility in both experimental setups and real-world applications.
- High-Resolution Cameras: Outfitted with Intel RealSense D405 cameras, ALOHA 2 offers an expansive field of view and high-resolution depth data, enabling accurate real-time tracking and object interaction. These cameras provide the essential visual data that teleoperators need for effective and precise manipulation, ensuring high fidelity in dynamic and visually complex tasks.
- MuJoCo Simulation: ALOHA 2 includes a precise MuJoCo (Multi-Joint dynamics with Contact) simulation model, accurately replicating physical manipulation tasks in a virtual environment. This model allows researchers to train policies and test algorithms in a realistic, safe simulation before deploying them in physical setups. For more details on the ALOHA 2 simulation model in MuJoCo, visit the MuJoCo ALOHA 2 model repository. This simulation framework accelerates development by providing a virtual testing ground, minimizing wear and tear on the physical hardware and allowing for rapid iteration of manipulation strategies.
Why Choose ALOHA 2?
ALOHA 2 represents a groundbreaking advancement in teleoperation technology, meticulously developed to address the critical challenges faced by researchers in robotic manipulation. It is designed with a comprehensive approach, ensuring compatibility with diverse research and industrial needs. ALOHA 2 stands out as the platform of choice for those seeking innovation, reliability, and performance in bimanual teleoperation tasks.
Key reasons to choose ALOHA 2 include:
- Enhanced Performance: ALOHA 2 integrates cutting-edge grippers with low-friction rails for precise and responsive control, a state-of-the-art gravity compensation system for stability, and high-resolution Intel RealSense cameras that expand the range and accuracy of tasks. These components work together seamlessly to ensure a robust teleoperation experience capable of handling both delicate and demanding operations.
- User-Friendly Operation: The platform prioritizes operator comfort and efficiency, incorporating ergonomic designs and intuitive control mechanisms. These features enable operators to engage in extended data collection sessions with minimal fatigue, promoting sustained productivity in research environments.
- Robustness and Scalability: Built with a simplified yet durable design, ALOHA 2 minimizes maintenance requirements and system downtime. Its modular construction allows for easy scalability, making it suitable for deployment in environments ranging from small research labs to large-scale robotic testbeds. The robust design ensures consistent performance, even under demanding conditions.
Moreover, the open-source nature of ALOHA 2 enables researchers to leverage its foundational designs, modify components, and contribute to the global development of teleoperation technology. This collaborative potential ensures that ALOHA 2 will continue to evolve and drive innovation in the field of robotic manipulation.
Applications of ALOHA 2
ALOHA 2 is a versatile platform with applications spanning research, industrial automation, and human-robot interaction. Its advanced features and flexible design make it an invaluable tool in a variety of domains, including:
- Robotic Learning: ALOHA 2 facilitates the creation of large-scale, high-quality datasets for training machine learning algorithms. Its precision grippers and reliable camera systems allow researchers to collect detailed manipulation data, enabling the development of more accurate and robust machine learning models for tasks like object recognition, grasping, and task planning.
- Human-Robot Interaction (HRI): The ergonomic and adaptable design of ALOHA 2 fosters seamless collaboration between humans and robots. It is ideal for applications where robots assist humans in tasks such as assembly, inspection, or caregiving, bridging the gap between human intuition and robotic precision in both industrial and assistive contexts.
- Teleoperation: ALOHA 2’s enhanced grippers and real-time responsiveness make it a leading choice for remote operation tasks. Applications include surgical teleoperation, disaster response, and hazardous material handling, where precision, safety, and reliability are paramount. The system’s user-friendly interface ensures that operators can execute complex tasks with confidence, even in high-stakes environments.
- Simulation Research: The integration of an accurate MuJoCo simulation model allows researchers to test and validate manipulation policies in a virtual environment. This significantly accelerates the research cycle by enabling extensive experimentation without incurring the physical wear-and-tear of real-world testing. The MuJoCo simulation model also allows researchers to replicate complex scenarios with high fidelity, ensuring the development of reliable algorithms and methodologies.


Integrating ALOHA 2 with ROS1
The ROS1 interface for ALOHA 2 streamlines teleoperation setup and configuration, allowing seamless integration of Dynamixel controls and RealSense camera inputs. Follow the steps below to set up your environment for smooth teleoperation and visualization in ROS.
Setup
-
Dependencies: Run
./dependencies.shto install necessary packages. - Check Dynamixel: Open Dynamixel Wizard, set Protocol 2.0, and ensure 1,000,000 bps. Limit current for gripper motors to prevent overload.
-
Update udev Rules: Retrieve serial numbers for each port with:
sudo udevadm info --name=/dev/ttyUSBX --attribute-walk | grep serial
Operation
-
Teleop Driver: Launch the teleoperation driver with
roslaunch aloha 4arms_teleop.launch. -
Visualization: Start the robot visualization using
roslaunch aloha_viz view_robot.launch. -
Depth Cameras: Launch RealSense cameras sequentially:
roslaunch aloha_realsense_cameras d405_01.launch roslaunch aloha_realsense_cameras d405_02.launch roslaunch aloha_realsense_cameras d405_03.launch roslaunch aloha_realsense_cameras d405_04.launch
Use Cases
The following demonstrations showcase the capabilities of ALOHA 2 in various practical teleoperation scenarios:
1. Box Unboxing
A precise bimanual task where ALOHA 2 opens a box and removes contents, showcasing coordination between grippers and teleoperator control.
Camera Output
RViz Visualization
Real-World Footage
2. Taking Garbage with Small Brush
ALOHA 2 uses a brush to gather small pieces of debris, highlighting delicate maneuverability and precision control.
Camera Output
RViz Visualization
Real-World Footage
3. Removing/Cutting Wires from an Electronic Board
ALOHA 2 demonstrates precision cutting and removal of wires from a circuit board, ideal for tasks requiring fine control in small spaces.
Camera Output
RViz Visualization
Real-World Footage
4. Assembling Lego-Type Organizer Boxes
Using precise positioning and assembly techniques, ALOHA 2 organizes small containers, demonstrating assembly tasks in constrained spaces.
Camera Output
RViz Visualization
Real-World Footage
5. Making Tea
ALOHA 2 prepares a cup of tea, involving liquid handling and delicate movements to pour water, demonstrating its applicability in service-oriented tasks.
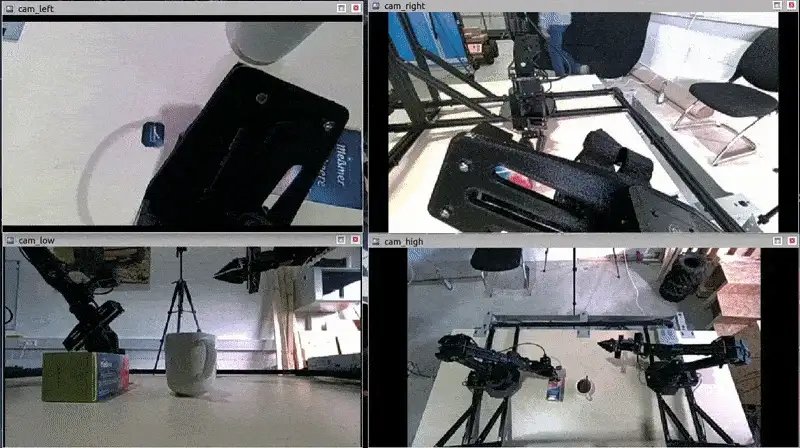
Camera Output
RViz Visualization

Real-World Footage
Special thanks to MuJoCo ALOHA 2 for providing the resources and development of this project.

