







Webserver für Roboter Use Cases
- Artikelnummer: MBS-WEB-01
- Kategorie: Zubehör
-
Hersteller:

Webserver für Roboter Use Cases
- ROS2-basierte Software
- Navigation und Mapping
- Speech-to-Action
- Monitoring und Fernzugriff
Beschreibung
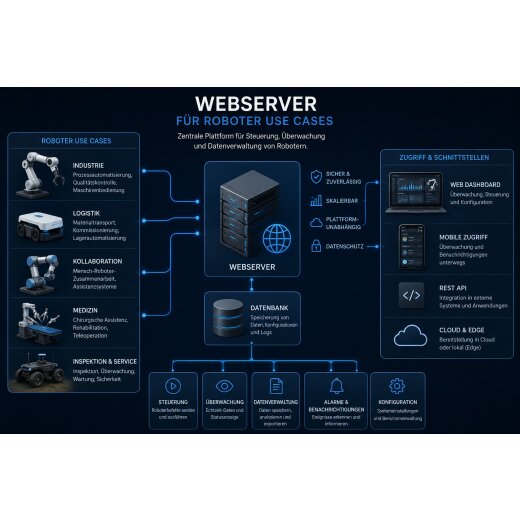
Unser Webserver läuft direkt auf dem Roboter und bildet die zentrale Bedienoberfläche für nahezu alle wichtigen Funktionen. Die Software basiert auf ROS2 (Robot Operating System 2), einem modernen Standard für professionelle Robotik. Sämtliche Funktionen werden über eine intuitive Weboberfläche bereitgestellt, sodass der Roboter bequem über einen normalen Browser gesteuert und überwacht werden kann – ganz ohne zusätzliche Spezialsoftware oder komplizierte Entwicklungsumgebungen.
Je nach Roboterplattform und installierter Hardware können unterschiedliche Funktionsumfänge zur Verfügung stehen. Nachfolgend sind die grundlegenden Möglichkeiten beschrieben.
1. Browserbasierte Robotersteuerung
Der Roboter kann vollständig über einen Webbrowser bedient werden. Dafür genügt ein PC, Tablet oder Smartphone im gleichen Netzwerk oder – je nach Konfiguration – auch ein Remote-Zugriff über das Internet. Über die grafische Benutzeroberfläche lassen sich unter anderem:
- den Roboter starten und stoppen,
- Bewegungen steuern,
- Geschwindigkeit anpassen,
- Arm- und Greiferbewegungen ausführen (modellabhängig),
- verschiedene Betriebsmodi auswählen,
- Kamerabilder anzeigen,
- sowie weitere Funktionen komfortabel bedienen.
Dadurch entfällt die Notwendigkeit, spezielle Robotiksoftware oder ROS-Entwicklungswerkzeuge auf dem Bedienrechner zu installieren.
2. ROS2-basierte Software mit grafischer Oberfläche
Die gesamte Software basiert auf ROS2, einem weltweit etablierten Framework für professionelle Robotik. Während ROS2 normalerweise umfangreiche technische Kenntnisse voraussetzt, übernimmt unser Webserver die grafische Aufbereitung der wichtigsten Funktionen. Dadurch können auch Anwender ohne Programmier- oder Robotikkenntnisse viele Aufgaben direkt über eine übersichtliche Benutzeroberfläche erledigen.
Der Webserver fungiert dabei als zentrale Schnittstelle zwischen den ROS2-Komponenten und dem Benutzer. Komplexe Hintergrundprozesse bleiben verborgen, während die Bedienung einfach und intuitiv erfolgt.
3. Speech-to-Action – Steuerung per Sprache
Der Roboter kann natürliche Sprachbefehle verarbeiten und daraus konkrete Aktionen ableiten. Beispiele hierfür sind:
- „Gehe in die Küche."
- „Fahre zum Besprechungsraum."
- „Starte deine Inspektionsrunde."
- „Kehre zur Ladestation zurück."
Damit solche Befehle zuverlässig funktionieren, muss die Umgebung zuvor kartiert (gemappt) werden. Anschließend werden Zielpunkte oder Räume definiert, auf die sich Sprachbefehle beziehen können. Je nach Projekt können zusätzlich individuelle Sprachbefehle und Abläufe eingerichtet werden.
4. Gespräche mit dem Roboter
Über einen integrierten KI-Assistenten kann der Roboter mit Menschen kommunizieren. Mögliche Einsatzbereiche sind beispielsweise:
- Begrüßung von Besuchern,
- Beantwortung häufig gestellter Fragen,
- Produkt- oder Unternehmensinformationen,
- Unterstützung auf Messen,
- Empfangs- und Serviceaufgaben,
- einfache Dialoge im Alltag.
Der Roboter kann sowohl auf gesprochene Sprache als auch auf Texteingaben reagieren und entsprechende Antworten generieren. Umfang und Qualität der Gespräche hängen von der eingesetzten KI-Lösung sowie der jeweiligen Projektintegration ab.
5. Navigation, Mapping und autonome Bewegung
Für autonome Fahr- oder Laufbewegungen wird zunächst die Umgebung mithilfe von SLAM (Simultaneous Localization and Mapping) erfasst. Dabei erstellt der Roboter eine digitale Karte seiner Umgebung und kann sich anschließend innerhalb dieser Karte selbstständig orientieren. Nach erfolgreichem Mapping sind unter anderem folgende Funktionen möglich:
- autonome Navigation zwischen definierten Zielpunkten,
- Wegpunktnavigation,
- wiederkehrende Fahr- oder Laufstrecken,
- definierte Patrouillen,
- No-Go-Zonen,
- virtuelle Sperrbereiche,
- automatische Rückkehr zur Ladestation (modellabhängig),
- Hinderniserkennung und Umfahrung (abhängig von Sensorik und Robotermodell).
Dadurch eignet sich der Roboter sowohl für Innenräume als auch – bei geeigneter Hardware – für bestimmte Außenbereiche.
6. Monitoring, Live-Daten und Fernzugriff
Über den Webserver lassen sich sämtliche wichtigen Betriebsdaten des Roboters zentral überwachen. Dazu gehören beispielsweise:
- Live-Kamerabilder,
- Kartenansicht,
- aktuelle Position,
- Batteriestatus,
- Sensordaten,
- Telemetrie,
- Diagnosen,
- Fehlermeldungen,
- Systemstatus,
- Netzwerkstatus.
Je nach Systemkonfiguration kann der Zugriff sowohl lokal im Netzwerk als auch über eine sichere Remote-Verbindung erfolgen. Dadurch lassen sich Roboter auch aus der Ferne überwachen oder bedienen.
7. Automatisierung und wiederkehrende Routinen
Ein besonderer Vorteil der Plattform ist die Möglichkeit, wiederkehrende Abläufe zu automatisieren. Dabei können definierte Routinen erstellt und jederzeit erneut ausgeführt werden. Typische Beispiele sind:
- regelmäßige Inspektionsrunden,
- Sicherheits- und Kontrollgänge,
- Gebäudeüberwachung,
- Produktionskontrollen,
- Lagerkontrollen,
- Besucherführungen,
- wiederkehrende Transportaufgaben.
An jedem definierten Wegpunkt können individuelle Aktionen ausgelöst werden. Beispiele hierfür sind:
- Fotos aufnehmen,
- Videoaufzeichnungen starten,
- Temperatur messen,
- Messwerte erfassen,
- QR- oder Barcodes scannen,
- Ansagen oder Warnmeldungen abspielen,
- Daten an externe Systeme übertragen,
- Sensoren auslesen,
- individuelle Kundenprozesse starten.
Welche Funktionen verfügbar sind, hängt von der verbauten Hardware sowie den jeweiligen Projektanforderungen ab. Für spezielle Anwendungen können zusätzliche Sensoren, Wärmebildkameras, Temperaturmodule, Gasdetektoren oder weitere Messsysteme integriert werden.
8. Erweiterbarkeit und individuelle Anpassungen
Da der Webserver vollständig auf ROS2 basiert, kann das System flexibel erweitert werden. Je nach Projekt lassen sich beispielsweise zusätzliche Funktionen integrieren:
- Anbindung an Gebäudeleittechnik,
- Industrie- und SPS-Schnittstellen,
- MQTT,
- REST-APIs,
- Datenbanken,
- ERP- oder MES-Systeme,
- IoT-Plattformen,
- KI-Modelle,
- Bilderkennung,
- Objekterkennung,
- Personenerkennung,
- kundenspezifische Dashboards,
- individuelle Automatisierungen und Workflows.
Dadurch eignet sich die Plattform sowohl für Demonstrationssysteme als auch für professionelle Industrie-, Forschungs-, Sicherheits- und Serviceanwendungen.
Wichtiger Hinweis zu Wasser- und Wetterschutz
Quadruped- und humanoide Roboter sind nicht grundsätzlich wasser- oder wetterfest. Sie sollten daher nicht ohne vorherige technische Prüfung in feuchten, nassen oder dauerhaft wetterexponierten Umgebungen eingesetzt werden. Nur bestimmte Robotermodelle verfügen über einen ausgewiesenen Schutz gegen Staub und Wasser. Beispiele sind:
- Unitree B2 mit Schutzklasse IP67
- Unitree A2 mit Schutzklasse IP66
Vor jedem Einsatz in Security-, Inspektions-, Industrie- oder Outdoor-Anwendungen sollte daher geprüft werden,
- welche IP-Schutzklasse das jeweilige Robotermodell besitzt,
- welche Umgebungsbedingungen vor Ort herrschen,
- und ob zusätzliche Schutzmaßnahmen erforderlich sind.
Insbesondere bei Regen, Spritzwasser, hoher Luftfeuchtigkeit oder stark verschmutzten Einsatzorten ist dieser Punkt für einen sicheren und zuverlässigen Betrieb von entscheidender Bedeutung.
Bewertungen
Es gibt noch keine Bewertungen.

