
Revolutionizing Robotics: The Inspire Dexterous Hand
A Leap Forward in Robotic Dexterity and Precision
Introducing the Inspire Dexterous Hand — a groundbreaking robotic innovation designed to bridge the gap between human-like dexterity and advanced technological precision. With 6 degrees of freedom, 12 motor joints, and integrated pressure sensors, it empowers researchers, developers, and industries to achieve unparalleled manipulation capabilities. Whether you’re advancing prosthetic designs or enhancing industrial automation, the Inspire Dexterous Hand is the tool to bring your vision to life. But the true marvel lies in its intelligent design and state-of-the-art capabilities.
Precision Meets Intelligence
What makes this robotic hand truly revolutionary? Equipped with state-of-the-art sensors, the Inspire Dexterous Hand delivers real-time tactile feedback and precise control over every movement. The integrated pressure sensors enhance its ability to handle delicate objects with care, while its powerful motor joints provide the strength needed for more demanding tasks. This combination of finesse and force makes it a versatile tool, capable of performing intricate operations as well as heavy-duty functions. Its seamless coordination and responsiveness truly mimic the fluidity of human hand movements, setting a new benchmark in robotic capability.
Compatibility
Built for Seamless Integration: ROS1 and ROS2 Ready
Engineered with adaptability in mind, the Inspire Dexterous Hand seamlessly integrates with a wide range of robotics platforms. Its support for both ROS1 and ROS2 ensures compatibility with the most popular frameworks used by researchers and developers worldwide. Whether you are operating in an existing ROS1 environment or transitioning to ROS2, the Dexterous Hand’s robust APIs and modular design make the process effortless. Beyond ROS, it offers flexible interfacing options, allowing smooth incorporation into diverse hardware and software ecosystems. With this level of integration, the Inspire Dexterous Hand is not just a tool — it’s a partner in innovation.
Compatible with Leading Robotics Solutions
The Inspire Dexterous Hand goes beyond framework compatibility to integrate seamlessly with popular ROS-based robotic systems. Whether it’s enhancing precision in robotic arms like xArm6 and UR5e or serving as the perfect addition to humanoid robots requiring advanced hand functionality, this hand adapts to a variety of platforms. Its plug-and-play setup and robust interfacing options ensure it can meet the needs of cutting-edge robotics research and applications. From industrial robotics to experimental prototypes, the Inspire Dexterous Hand scales effortlessly to match your ambitions.
Getting Started: Quick Start Guide
Hardware Setup
-
Connect Your Hand to the Computer:
Plug the Inspire Dexterous Hand into your computer via USB.
-
Identify the connection port:
Run the following command to identify the connection:
lsusbLook for a name like:
Bus 003 Device 019: ID 1a86:7523 QinHeng Electronics HL-340 USB-Serial adapter -
Set Connection Port Permissions:
Temporary permissions (reset on reboot):
sudo chmod a+rw /dev/ttyUSB*For Ubuntu 22.04 users, remove conflicting drivers if needed:
sudo apt remove brltty -
Optional: Add Permanent Udev Rules:
Copy the rules file from the repository provided by MyBotShop
inspire_hand_driver/debian/99-inspire-hand.rulesto:
/etc/udev/rules.d/Reload and apply rules:
sudo udevadm control --reload-rules && sudo udevadm triggerConfirm with:
ls /dev/inspire_hand
Install Required Software
-
Install the serial driver:
sudo apt-get install ros-humble-serial-driver -
Build the repository:
colcon build --symlink-install -
Source the workspace:
source/install/setup.bash
Launch and Operate
-
Start the system:
ros2 launch inspire_hand_bringup system.launch -
Run a demo:
ros2 run inspire_hand demo
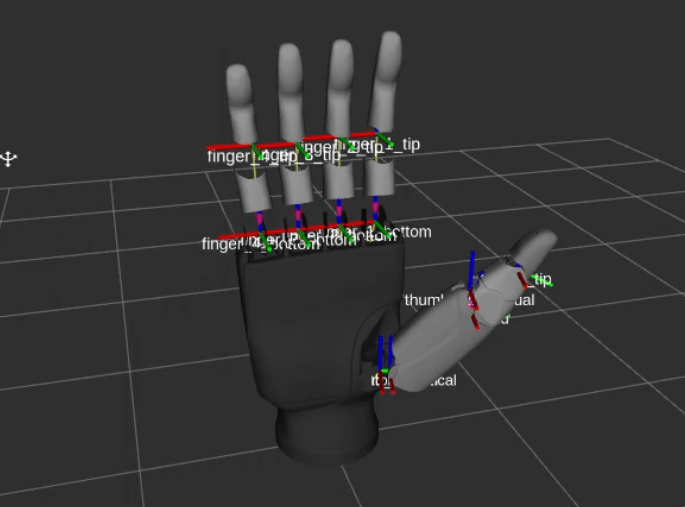
Visual Geometry Representation of the Inspire Hand
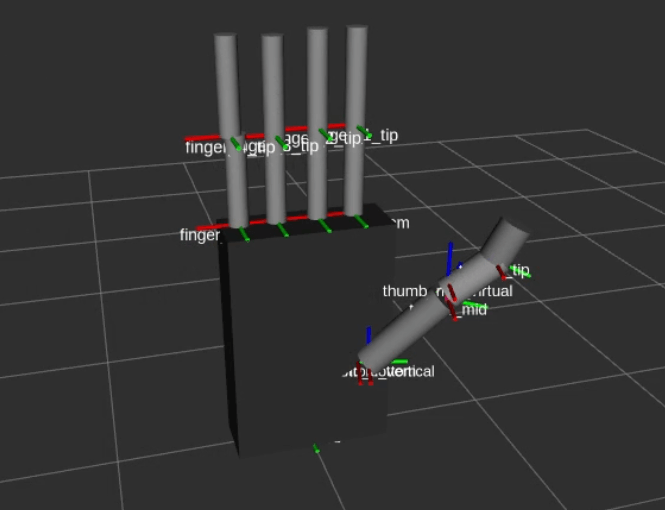
Collision Geometry Mapping for Real-Time Applications
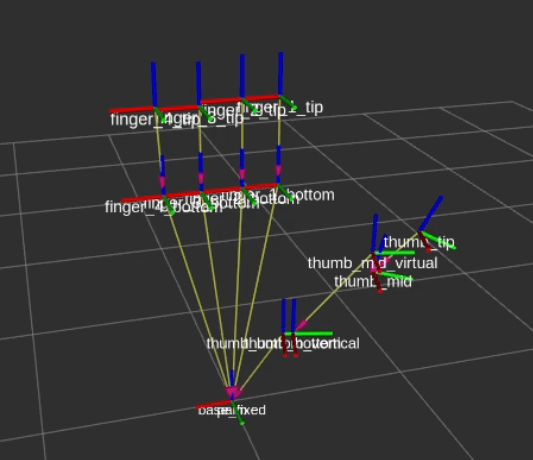
Transformation Matrix Overview for Robotic Movements
Hand Status
-
Read actual position values:
ros2 service call /inspire_hand_driver/get_pos_act "{}" -
Monitor actual angle values:
ros2 service call /inspire_hand_driver/get_angle_act "{}" -
Check force thresholds:
ros2 service call /inspire_hand_driver/get_force_act "{}"
Debugging
-
Retrieve fault information:
ros2 service call /inspire_hand_driver/get_error "{}" -
Check status information:
ros2 service call /inspire_hand_driver/get_status "{}" -
Clear errors:
ros2 service call /inspire_hand_driver/set_clear_error "{}"
Parameter Settings
-
Set default speed:
ros2 service call /inspire_hand_driver/set_default_speed "{speed0: 0, speed1: 0, speed2: 0, speed3: 0, speed4: 0, speed5: 0}" -
Set default force control threshold:
ros2 service call /inspire_hand_driver/set_default_force "{force0: 0, force1: 0, force2: 0, force3: 0, force4: 0, force5: 0}" -
Save settings to flash memory:
ros2 service call /inspire_hand_driver/set_save_flash "{}"
Calibration
-
Calibrate force sensors:
ros2 service call /inspire_hand_driver/set_force_clb "{}"
Use Cases: Real-World Applications in Action
Explore how the Inspire Dexterous Hand is pushing the boundaries of robotic manipulation. Below are four compelling real-world use cases, each demonstrating its capabilities through engaging visuals and cutting-edge functionality.
1. Autonomous Fruit Picking
Mounted on the XArm5 robotic arm, the Inspire Dexterous Hand showcases its agricultural potential by autonomously grasping an orange from a plant. With precise tactile sensors and fine motor control, it ensures the fruit is gently plucked without damage, paving the way for automation in harvesting tasks.
2. Interactive Gameplay: Rock-Paper-Scissors
Integrated with the Unitree H1 humanoid robotic arm, the Inspire Dexterous Hand autonomously plays rock-paper-scissors with a human partner. Its responsive motion and decision-making algorithms highlight its dexterity and real-time interaction capabilities, bringing a fun and engaging aspect to human-robot interaction.
3. Autonomous Cloth Folding
In a remarkable demonstration of practical utility, the Inspire Dexterous Hand, mounted on the Unitree H1 humanoid robotic arm, autonomously folds clothes. This use case underscores its precision and adaptability in household or industrial settings, making tedious tasks more efficient and automated.
4. Keyboard Typing: “Hello World”
Showcasing its finesse and dexterity, the Inspire Dexterous Hand, attached to the Unitree H1 humanoid robotic arm, types “Hello World” on a keyboard. The real-time display of its typing on a connected monitor emphasizes its potential for fine motor tasks in teleoperation, programming, and more.
Autonomous Fruit Picking
Interactive Gameplay: Rock-Paper-Scissors

Autonomous Cloth Folding

Keyboard Typing: “Hello World”
Thank You for Exploring the Inspire Dexterous Hand
We hope this newsletter has provided valuable insights into the remarkable capabilities of the Inspire Dexterous Hand and its real-world applications. Whether you're looking to enhance automation in various fields, from agriculture to robotics, or you’re exploring new frontiers in human-robot interaction, the Inspire Dexterous Hand is the perfect tool for the job.
To purchase your own Inspire Dexterous Hand, visit our product page.
For further information or to make inquiries, feel free to reach out to us at:
- For more info: info@mybotshop.de
- For technical inquiries: support@mybotshop.de
Please note that the content showcased here represents the individual achievements of Humanoid AI and Omni Human-to-Humanoid, and there has been no collaboration between them and our organization. The videos and GIFs included on this page are intended strictly for educational and demonstrative purposes.
To learn more about the projects referenced, visit:
Thank you for your continued interest in innovative robotic solutions. Stay tuned for more exciting updates!



