
Autonomous robots explore complex infrastructures like underground mines, facing challenges such as GPS unavailability and hazardous conditions [2] [3] . The DARPA subterranean challenge highlighted the need for effective path planning and SLAM [4] [5] .Robotic exploration in tunnels demands robust mobility due to slippery, rocky, and obstructed terrains [1] . Sensor performance suffers from environmental obstacles like dust and fog, complicating navigation [2] [3] . Satellite-based navigation is futile underground, necessitating SLAM techniques for mapping [4] [5] .


Long-term exploration requires overcoming challenges like sensor degradation and obscurants [1] . A novel exploration path planning algorithm is essential for subterranean environments, aiming to compare with existing techniques [2] [3] . The strategy must address the complexities of underground terrain while ensuring accurate mapping [4] [5] .Autonomous robotic exploration minimizes human risk and operational costs in hazardous environments [2] [3] . Efficient navigation strategies are crucial for continuous exploration and mapping [4] [5] . These strategies ensure the robot's effectiveness in traversing and mapping challenging terrains [2] [3] .
Tunnel exploration presents challenges like limited mobility and degraded sensor performance [1] . Satellite-based navigation is ineffective, necessitating SLAM techniques for mapping [4] [5] . The proposed strategy aims to address these challenges through innovative path planning algorithms [2] [3] . The significance of autonomous robotic exploration lies in its ability to minimize human risk and ensure continuous operation in hazardous environments [2] [3] . The proposed algorithm seeks to enhance navigation and mapping in subterranean environments [4] [5] . Evaluation will involve simulation-based assessments and real-world deployments [2] [3] . In conclusion, autonomous robotic exploration in tunnels demands innovative path planning algorithms to overcome challenges like limited mobility and degraded sensor performance. The proposed strategy aims to address these issues while ensuring accurate mapping and navigation in hazardous environments [2] [3] [4] [5] .
State-of-the-Art
Robot path planning is an essential aspect of ensuring safe navigation in dynamic environments [6] . Numerous studies delve into diverse methodologies for autonomous exploration, including the innovative LAMP 2.0 system [7] , aimed at overcoming challenges encountered in subterranean environments. These investigations underscore the significance of robust path planning algorithms and SLAM techniques in enabling robots to navigate complex and hazardous terrains with efficiency and safety. LAMP 2.0, in particular, stands out for its comprehensive approach to multi-robot SLAM and exploration, offering insights into addressing the unique obstacles presented by large-scale underground environments.
LAMP 2.0: Multi-Robot SLAM System
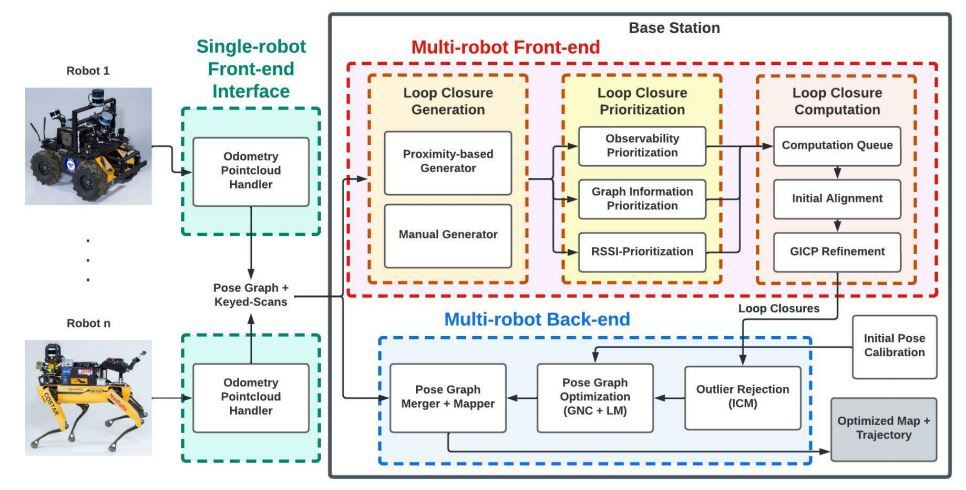
LAMP 2.0 presents a robust SLAM system for large-scale underground environments [7] . It incorporates a multi-robot front-end with loop closure detection and a back-end for pose graph optimization [7] . The system utilizes heterogeneous odometry and lidar setups, correcting distortions and optimizing point cloud data [7] . Testing on diverse datasets validates LAMP 2.0's effectiveness in real-world scenarios [7] .LAMP 2.0's front-end interface handles odometry and point cloud streams from multiple robots [7] . It employs the HeRO system for lidar scan corrections and voxelization filters for point cloud optimization [7] . The multi-robot back-end optimizes trajectories through pose graph optimization and loop closure detection [7] . Testing with different robot types and datasets confirms LAMP 2.0's robustness and scalability [7] .
The LAMP 2.0 system emerges as a pivotal contribution to robotic exploration and mapping in subterranean environments [7] . Its robust multi-robot SLAM capabilities and advanced path planning algorithms address critical challenges such as obstacle avoidance and precise mapping [7] . The comprehensive architecture of LAMP 2.0 provides a solid foundation for further research and integration into autonomous robotic systems, promising enhanced autonomy and effectiveness in navigating challenging underground scenarios [7] . Its adaptability and reliability make it a valuable tool for future endeavors in subterranean exploration and mapping, paving the way for safer and more efficient robotic operations in dynamic underground environments [7] .
Robot Navigation and Mapping
Robot mapping and navigation are indispensable components of autonomous systems, facilitating intelligent mobility across diverse environments [14] . Navigation involves planning robot travel from current to predetermined locations, relying on sensor data for decision-making [14] . Path-planning algorithms optimize routes based on variables like distance, time, and safety [14] . The framework for Autonomous Mapping and Exploration with Unmanned Aerial Vehicles (UAVs) using Low-Cost Sensors addresses mapping and exploration challenges in unfamiliar environments [14] . It utilizes frontier-based exploration and an extended Kalman filter for sensor data fusion [14] . Path planning integrates frontier exploration, A* algorithm for global planning, and dynamic window approach for local planning [14] .
The integration of SLAM techniques and path planning algorithms, along with the utilization of frontier exploration, enhances navigation within the proposed solution [14] . By employing frontier exploration, the framework maximizes map coverage and maintains control over the UAV's velocity, orientation, and position [14] . Additionally, mapping operations rely on GMapping or grid mapping techniques, which facilitate the creation of a detailed 2D occupancy grid map using data from LIDAR and pose sensors [14] . For autonomous navigation within the constructed grid map, the system employs a combination of global and local planners [14] . The global planner utilizes the A* algorithm to determine optimal routes, while the local planner calculates velocities and navigates around obstacles based on predefined cost map parameters [14] . To ensure precise localization, the system utilizes scan matcher nodes and an adaptive Monte Carlo localization stack for correcting UAV position errors [14] . Testing across simulation and real-world scenarios underscores the effectiveness of the framework, particularly in autonomous operation using solely an RGBD camera for UAV systems [14] . Through frontier exploration, the system successfully explores environments and generates detailed 3D maps, while the integration of RGBD cameras, the A* algorithm, and Ardupilot further enhances navigation and mapping capabilities [14] .
UAV Navigation in GPS-Denied Environments
The Framework for UAV Navigation and Exploration in GPS-denied Environments proposes a sequential decision process under uncertainty using POMDP [8] . It enables UAVs to navigate in GPS-denied environments, such as mines or dense canopies [8] . The framework integrates SLAM, visual odometry, and POMDP for decision-making [8] .Utilizing localization algorithms like SLAM and visual odometry, the framework models sequential decision problems in navigation and exploration tasks [8] . POMDP addresses uncertainties in UAV navigation without GPS, providing motion plans based on belief states [8] . Motion commands generated by the POMDP planner are forwarded to UAV flight controllers using MAVLink [8] .
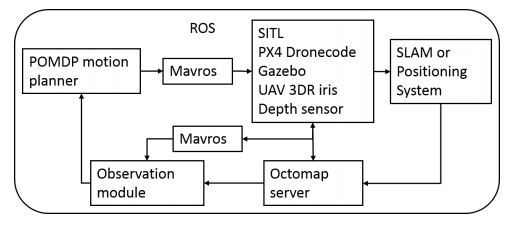
The framework's state variables include the position, heading angle, and obstacle detection variable of the quad-rotor [8] . The transition function models dynamic responses to motion commands, while the 3D occupancy library represents the environment map [8] . Simulation results demonstrate successful exploration and mapping in GPS-denied environments [8] . Testing in simulation using an off-the-shelf UAV model reveals the framework's ability to explore environments and generate occupancy maps while avoiding obstacles [8] . In scenarios with GPS-denied zones, the UAV maximizes information gain while maintaining a safe distance from walls [8] . The framework presents a valuable solution for navigation and exploration in GPS-denied environments [8] .
Robotic Simultaneous Localization and Mapping (SLAM)
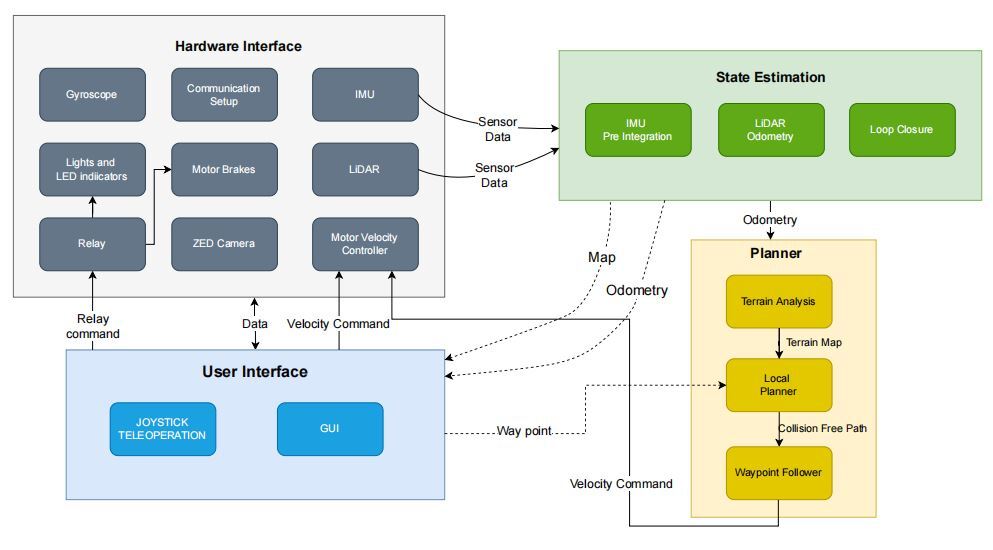
Simultaneous Localization and Mapping (SLAM) is a critical capability for autonomous robotic systems, enabling real-time mapping and self-localization. The RHINO autonomous robot presented by [9] exemplifies the application of SLAM in navigating underground mines, where GPS signals are inaccessible. RHINO employs LIDAR and IMU sensors and utilizes the LIO-SAM framework to generate 3D maps while navigating rugged terrain. The system architecture encompasses hardware interfacing, state estimation, planning, and user interfaces [9] .
RHINO's state estimation module relies on LiDAR-inertial odometry via LIO-SAM, ensuring accurate localization during navigation tasks [9] . The planning module receives waypoint commands, facilitating path-following and local planning, crucial for navigating through complex environments. RHINO's ability to navigate various terrains, including underground mines, indoor obstacle courses, and outdoor landscapes, demonstrates its effectiveness in autonomous operation [9] .
Camera-LiDAR Calibration in Unstructured Environments
Calibrating camera-LiDAR systems in unstructured environments is essential for accurate perception in robotic applications. [10] proposes a novel targetless calibration method using local edge features to estimate the extrinsic parameters between camera and LiDAR sensors. The method employs a P3P algorithm and a Kalman filter for stability, offering improved precision compared to traditional target-based approaches [10] . The calibration procedure involves preprocessing sensor data, co-registering camera-LiDAR points, and estimating relative transforms using the P3P algorithm [10] . Testing on various environments demonstrates the method's effectiveness in improving calibration precision and adaptability to autonomous navigation applications [10] . The proposed online calibration approach holds promise for enhancing perception accuracy in robotic systems operating in unstructured environments.
Robotic Exploration
Robotic systems are crucial for exploring hazardous or inaccessible areas such as tunnels and mines [11] . These robots use advanced sensors to inspect structural integrity and detect risks, enhancing safety and productivity [11] . Exploration-RRT offers a framework for multi-objective path planning in unknown terrain [11] . It integrates pseudo-random goal generation with path planning to explore challenging environments [11] . The ERRT system shows promise for 3D exploration missions in unstructured environments [11] . Active SLAM-based algorithms enable autonomous exploration in indoor environments [12] . These algorithms integrate mapping results with cost maps for navigation [12] . While effective, they don't significantly contribute to our thesis goals. Autonomous Search for Underground Mine Rescue combines lidar and thermal vision for exploration [13] . It employs a convolutional neural network for object identification [13] . The method shows promise for autonomous exploration in dark, GPS-denied environments [13] .

Frontier-based exploration algorithms enable autonomous mapping in unknown environments [15] . They utilize Gmapping and move base packages for mapping and navigation [15] . Both algorithms could be useful for our thesis objectives [15] . Automatic tunnel inspection methods utilize robotics and NDI techniques for structural assessment [16] . These methods enhance safety and reduce manual inspection time [16] . They could provide valuable insights for our thesis application [16] .
Limitations of Previous Work
-
Adaptability to Dynamic Surroundings:
- Current exploration tactics may struggle with rapid changes in environments [11] .
- Mobile robots need improved adaptability to handle unforeseen obstacles and terrain changes [11] .
-
Scalability in Large-Scale Tunnels:
- Existing approaches face challenges when applied to large tunnel networks [6] .
- Scaling up exploration tactics without sacrificing accuracy poses a significant hurdle [6] .
-
Sensor Limitations for Inspection Precision:
- Robotic tunnel inspection systems may be limited by sensor technology [17] .
- Improving sensor capabilities is crucial for precise structural evaluations [17] .
Challenges with Real-time Decision Making: Some systems struggle with real-time decision-making during exploration [9] . Quick and informed decision-making is vital for efficient data collection [9] . Standardized inspection procedures are lacking, hindering interoperability among robotic systems [18] . Establishing universal standards could enhance reliability and consistency in tunnel evaluations [18] . While recent research advances robotic inspection and exploration, addressing these limitations is crucial [18] . Future studies should focus on overcoming obstacles to create more adaptable and effective robotic systems [18] .
Introduction to RRT
Exploring the depths of tunnels and creating detailed 3D maps pose significant challenges for humans due to the inherent risks involved. However, with the advent of autonomous robots equipped with sensors and advanced algorithms, such tasks have become feasible. These robots can navigate through complex tunnel networks, gather data, and generate comprehensive maps essential for various applications, including disaster response and infrastructure assessment. Two groundbreaking frameworks, namely the "Exploration-RRT" and "Explore Locally, Plan Globally," have been proposed to address the challenges of robotic tunnel exploration and 3D map creation [11] [6] .
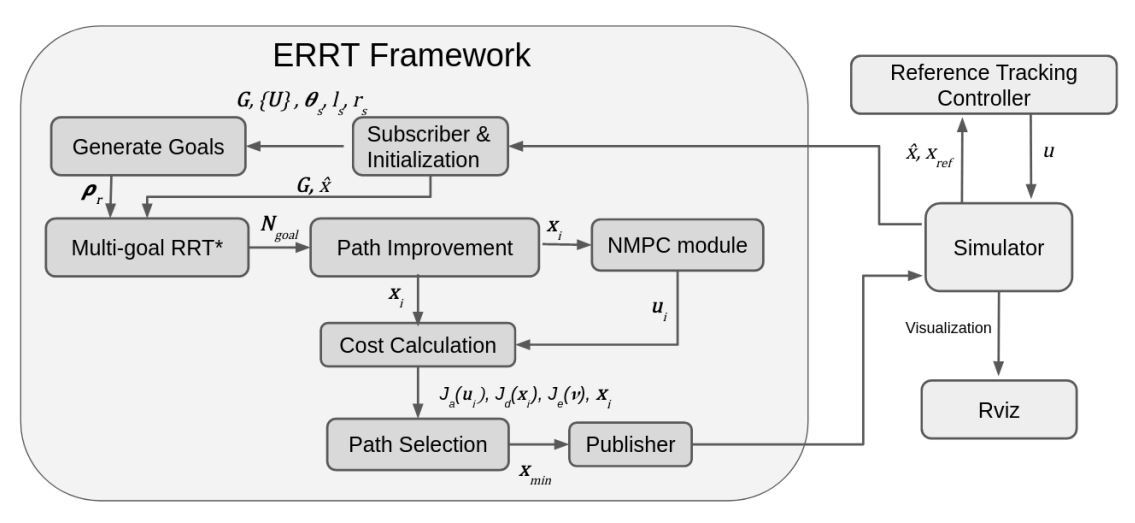
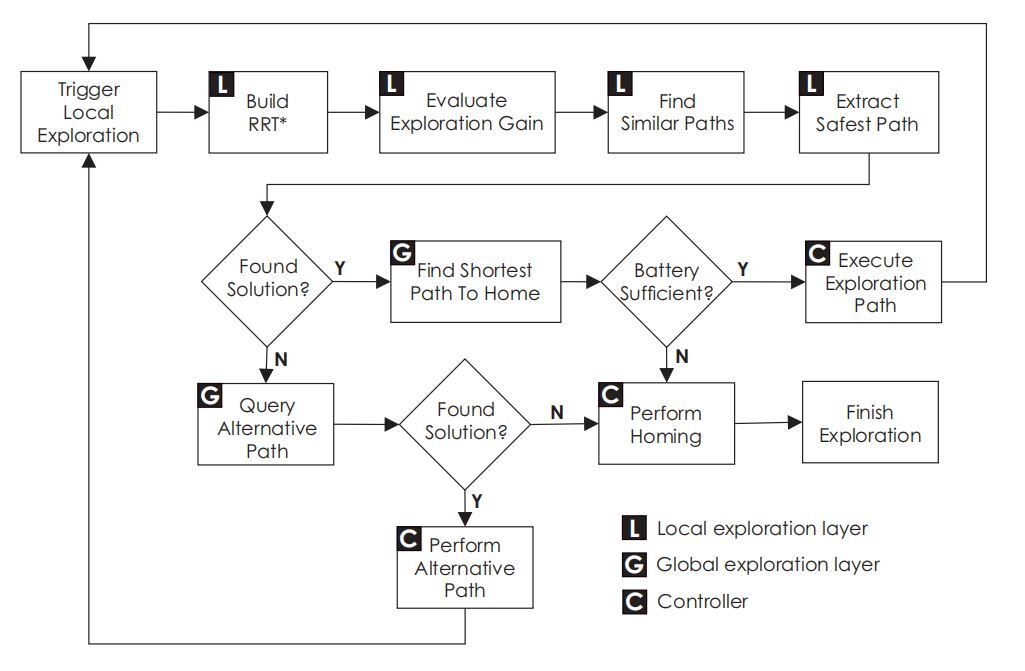
The "Exploration-RRT" framework builds upon the Rapidly-exploring Random Tree (RRT) algorithm, a fundamental tool for path planning in robotics. Unlike the traditional RRT algorithm, this framework extends its capabilities to incorporate multi-objective optimization principles, such as exploration efficiency and obstacle avoidance, while maintaining path length minimization. Customized cost functions guide the tree expansion process, ensuring that generated paths strike a balance between exploration, obstacle avoidance, and efficiency. This multi-objective approach makes the framework suitable for navigating diverse subterranean environments, where the robot's trajectory must be well-balanced [11] .
The "Explore Locally, Plan Globally" framework takes a holistic approach to robotic tunnel exploration by integrating local perception techniques with global path planning strategies. Leveraging sensors like LiDAR and cameras, the framework captures data about the robot's immediate surroundings and processes it using Simultaneous Localization and Mapping (SLAM) techniques to generate a local map. This local map serves as the foundation for high-level global path planning decisions, ensuring that the robot's actions align with exploration objectives within the broader context of the environment. By combining local and global information, this integrated approach enhances exploration effectiveness and efficiency [6] .
Priority-Based Depth-First Search (PDFS)
In autonomous mobile robot navigation, especially within tunnel environments, specialized exploration strategies are essential due to complex structures and dynamic challenges. While conventional methods like depth-first search offer insights in graph-like scenarios, they may not fully address the intricacies of tunnel networks. Priority-Based Depth-First Search (PDFS) is a customized exploration strategy designed to maximize tunnel exploration and simplify data collection.
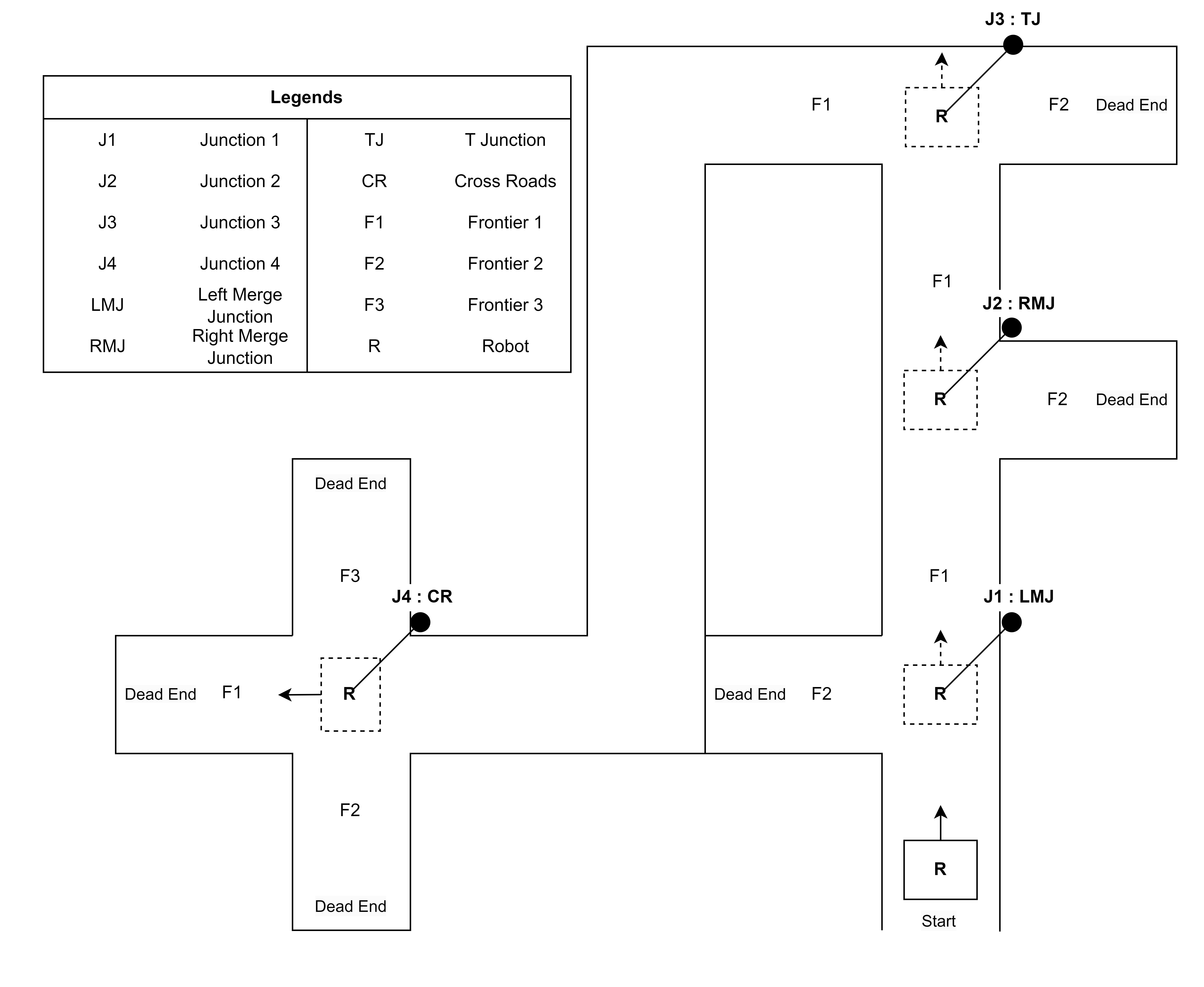
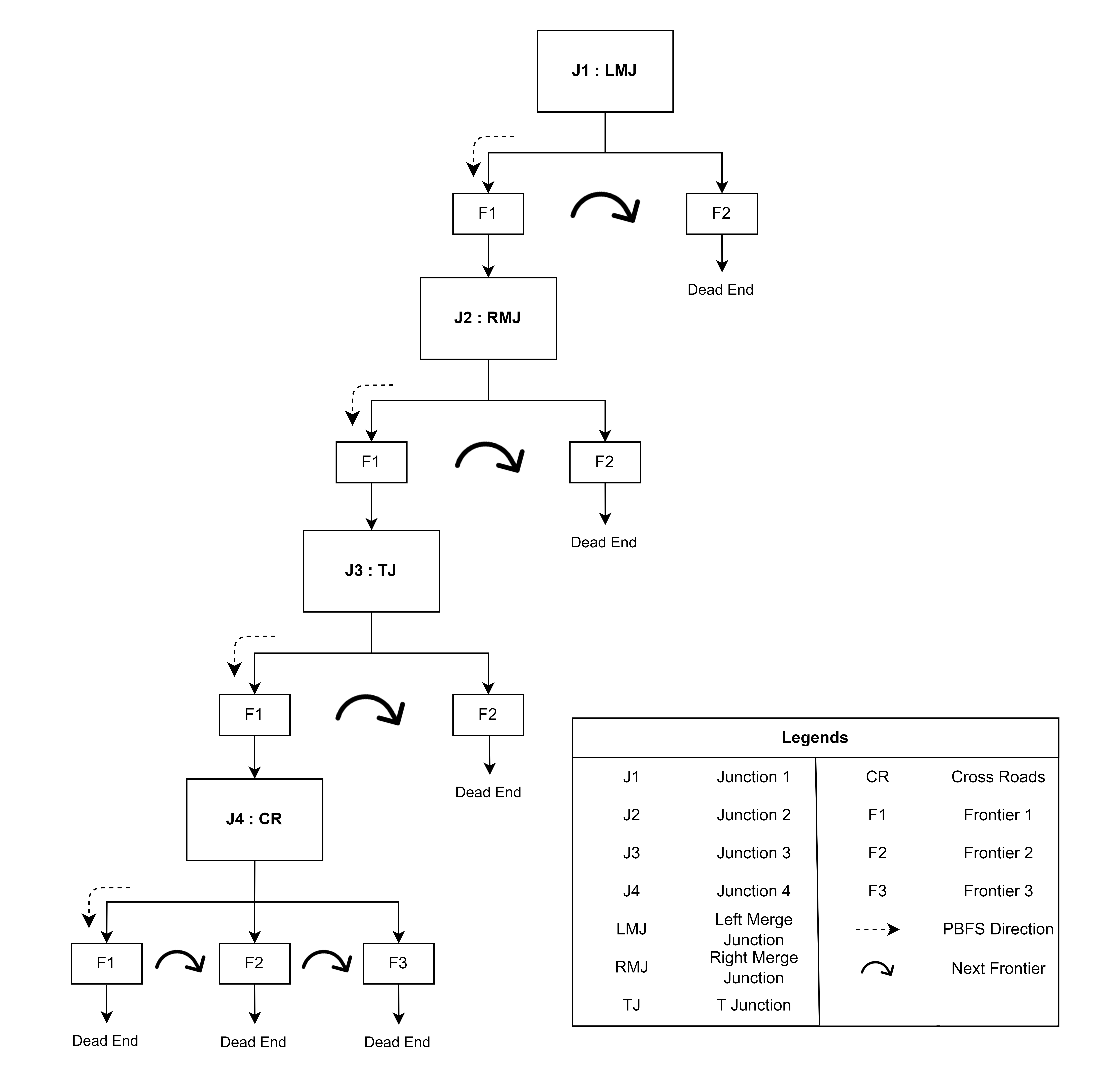
Tunnel environments pose specific difficulties such as branching paths and interconnected junctions, requiring adaptive exploration strategies. PDFS prioritizes exploration according to predetermined criteria and emphasizes critical places within tunnel structures to navigate efficiently. It dynamically modifies its exploration trajectory using a depth-first strategy, adapting to complex tunnel structures and adjusting to shifting environmental conditions in real-time. PDFS keeps track of junctions detected and their frontiers, maintaining a dictionary of explored and unexplored frontiers for each junction. It continues exploration in the F1 direction upon junction detection and explores other unexplored frontiers in case of a dead-end. When all frontiers of a junction are explored, it navigates toward the previous junction's unexplored frontiers, finishing exploration once all frontiers are explored.
Implementation of PDFS has the potential to transform tunnel exploration tactics by providing customized solutions for efficiently navigating tunnel environments. It enhances the capabilities of autonomous mobile robot navigation by strategic prioritization and adaptability.The figure illustrates the working of PDFS algorithm in an environment.
The implementation of Priority-Based Depth-First Search can significantly enhance autonomous mobile robot navigation in complex and dynamic tunnel environments through strategic prioritization and adaptability.
References[1] C. Tatsch, J. A. B. Jnr, D. Covell, I. B. Tulu, and Y. Gu, “Rhino: An autonomous robot for mapping underground mine environments,” arXiv preprint arXiv:2305.06958, 2023.
[2] R. Almadhoun, T. Taha, L. Seneviratne, J. Dias, and G. Cai, “A survey on inspecting structures using robotic systems,” International Journal of Advanced Robotic Systems, vol. 13, no. 6, p. 1729881416663664, 2016.
[3] S. S. Mansouri, C. Kanellakis, E. Fresk, D. Kominiak, and G. Nikolakopoulos, “Cooperative coverage path planning for visual inspection,” Control Engineering Practice, vol. 74, pp. 118–131, 2018.
[4] M. Palieri, B. Morrell, A. Thakur, K. Ebadi, J. Nash, A. Chatterjee, C. Kanellakis, L. Carlone, C. Guaragnella, and A.-a. Agha-Mohammadi, “Locus: A multi-sensor lidar-centric solution for high-precision odometry and 3d mapping in real-time,” IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 421–428, 2020.
[5] S.-K. Kim, A. Bouman, G. Salhotra, D. D. Fan, K. Otsu, J. Burdick, and A.-a. Agha-mohammadi, “Plgrim: Hierarchical value learning for large-scale exploration in unknown environments,” in Proceedings of the International Conference on Automated Planning and Scheduling, vol. 31, 2021, pp. 652–662.
[6] T. Dang, S. Khattak, F. Mascarich, and K. Alexis, “Explore locally, plan globally: A path planning framework for autonomous robotic exploration in subterranean environments,” in 2019 19th International Conference on Advanced Robotics (ICAR). IEEE, 2019, pp. 9–16.
[7] Y. Chang, K. Ebadi, C. E. Denniston, M. F. Ginting, A. Rosinol, A. Reinke, M. Palieri, J. Shi, A. Chatterjee, B. Morrell et al., “Lamp 2.0: A robust multi-robot slam system for operation in challenging large-scale underground environments,” IEEE Robotics and Automation Letters, vol. 7, no. 4, pp. 9175–9182, 2022.
[8] F. Vanegas, K. J. Gaston, J. Roberts, and F. Gonzalez, “A framework for uav navigation and exploration in gps-denied environments,” in 2019 ieee aerospace conference. IEEE, 2019, pp. 1–6.
[9] C. Tatsch, J. A. B. Jnr, D. Covell, I. B. Tulu, and Y. Gu, “Rhino: An autonomous robot for mapping underground mine environments,” arXiv preprint arXiv:2305.06958, 2023.
[10] M. ´A. Mu˜noz-Ba˜n´on, F. A. Candelas, and F. Torres, “Targetless camera-lidar calibration in unstructured environments,” IEEE Access, vol. 8, pp. 143 692–143 705, 2020.
[11] B. Lindqvist, A. A. Agha-Mohammadi, and G. Nikolakopoulos, “Exploration-RRT: A multi-objective path planning and exploration framework for unknown and unstructured environments,” in 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2021, pp. 3429–3435. [Online]. Available: https://ieeexplore.ieee.org/abstract/document/9636243/
[12] D. Trivun, E. ˇSalaka, D. Osmankovi´c, J. Velagi´c, and N. Osmi´c, “Active slam-based algorithm for autonomous exploration with mobile robot,” in 2015 IEEE International Conference on Industrial Technology (ICIT). IEEE, 2015, pp. 74–79.
[13] T. Dang, F. Mascarich, S. Khattak, H. Nguyen, H. Nguyen, S. Hirsh, R. Reinhart, C. Papachristos, and K. Alexis, “Autonomous search for underground mine rescue using aerial robots,” in 2020 IEEE Aerospace Conference. IEEE, 2020, pp. 1–8.
[14] A. A. Ravankar, A. Ravankar, Y. Kobayashi, and T. Emaru, “Autonomous mapping and exploration with unmanned aerial vehicles using low cost sensors,” Multidisciplinary digital publishing institute proceedings, vol. 4, no. 1, p. 44, 2018.
[15] K. Verbiest, S. A. Berrabah, and E. Colon, “Autonomous frontier based exploration for mobile robots,” in Intelligent Robotics and Applications: 9th International Conference, ICIRA 2015, Portsmouth, UK, August 24–27, 2015, Proceedings, Part III. Springer, 2015, pp. 3–13.
[16] C. Balaguer, R. Montero, J. Victores, S. Mart´ınez, and A. Jard´on, “Towards fully automated tunnel inspection: A survey and future trends,” in ISARC. Proceedings of the International Symposium on Automation and Robotics in Construction, vol. 31. IAARC Publications, 2014, p. 1. [Online]. Available: https://www.researchgate.net/profile/Juan-Victores/publication/269695712 Towards Fully Automated Tunnel Inspection A Survey and Future Trends/links/54aa77cc0cf2bce6aa1d225d/ Towards-Fully-Automated-Tunnel-Inspection-A-Survey-and-Future-Trends.pdf
[17] K. Loupos, A. D. Doulamis, C. Stentoumis, E. Protopapadakis, K. Makantasis, N. D. Doulamis, A. Amditis, P. Chrobocinski, J. Victores, R. Montero et al., “Autonomous robotic system for tunnel structural inspection and assessment,” International Journal of Intelligent Robotics and Applications, vol. 2, pp. 43–66, 2018.
[18] R. Montero, J. G. Victores, S. Martinez, A. Jard´on, and C. Balaguer, “Past, present and future of robotic tunnel inspection,” Automation in Construction, vol. 59, pp. 99–112, 2015.
Disclaimer
This is an informational blog. Any views or opinions represented in this blog are for informational purposes do not represent those of people, institutions or organizations that the owner may or may not be associated with in professional or personal capacity, unless explicitly stated.
Any views or opinions are not intended to malign any religion, ethnic group, club, organization, company, or individual.
The owner of this blog makes no representations as to the accuracy or completeness of any information on this site or found by following any link on this site.
The owner will not be liable for any errors or omissions in this information nor for the availability of this information. The owner will not be liable for any losses, injuries, or damages from the display or use of this information.
Downloadable Files and Images
Any downloadable file, including but not limited to pdfs, docs, jpegs, pngs, is provided at the user’s own risk. The owner will not be liable for any losses, injuries, or damages resulting from a corrupted or damaged file.
Comments
Comments are welcome. However, the blog owner reserves the right to edit or delete any comments submitted to this blog without notice due to :
-
Comments deemed to be spam or questionable spam.
-
Comments including profanity.
-
Comments containing language or concepts that could be deemed offensive.
-
Comments containing hate speech, credible threats, or direct attacks on an individual or group.
The blog owner is not responsible for the content in comments. This blog disclaimer is subject to change at any time. Furthermore, the reader acknowledges and agrees that any information or materials provided by MYBOTSHOP GmbH are for R&D purposes only. Any kind of services are provided "AS IS" and without any representation or warranty of any kind, express or implied, including but not limited to any warranty of merchantability, fitness for a particular purpose, non-infringement, or any other warranty. MYBOTSHOP GmbH shall not be liable for any damages, including but not limited to direct, indirect, special, incidental, or consequential damages, arising out of or in connection with the use or inability to use the information or materials provided. This limitation on liability shall apply regardless of the form of action, whether in contract, tort, or otherwise.
Contact: Incase of any issues, typos, or suggestions please contact support@mybothop.de
Important Note: The information contained in this blogpost has been conducted and provided by Mr. Wasif Noor from his thesis in collaboration with Ostbayerische Technische Hochschule (OTH) Regensburg.



