




















ROS 3D-SLAM & Waypoint Navigation
- SKU: MBS-SE-03
- Category: Accessories
-
Manufacturers:

3D-SLAM & Waypoint Navigation
- Indoor & Outdoor
- 3D-SLAM basierend auf einem Ouster 3D-LiDAR
- Outdoor Waypoint Navigation: GNSS / RTK Empfänger
Description

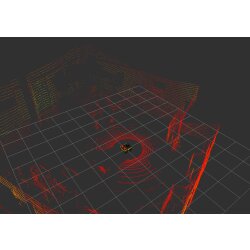
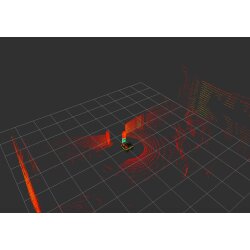
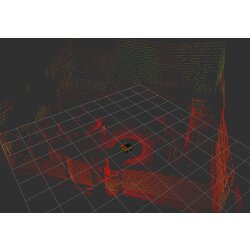
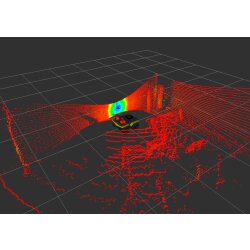
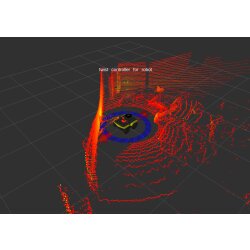
3D-SLAM
For 3D SLAM an Ouster lidar is used. The robot will have ability to create a 3d map of the environment when teleoperated. Optionally localization on created 3d map could be provided.
Indoor and outdoor autonomous navigation
For indoor navigation a map based tested solution using navigation stack will be provided. This package than will be updated to use GPS readings in its localization and than later on this GPS based localization will be further provided. Here in outdoor navigation two different types of interaction with the package can be achieved:
1.Specifying goal position in longitude, latitude
2. Goal position specified in x, y coordinate system
In both ways the robot will autonomously navigate to the goal position. .
Web interface (optional)
A web based interface written in QT can also be provided to interact with the robot. This interface can be as a tool for controling the robot or as web based visualizer to observe sensor data. This can be customized as per project requirements Please note: For the third Position: Web interface, additional costs have to be charged
Reviews
There are no reviews yet.

